5.13. ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ.
На практике замечено, что
ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой.
В ряде случаев он превышает номинальный ток в 6 — 10 раз.
Такой нагрузки может не
выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска
крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой
ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов
и автотрансформатора.
Принцип ограничения тока
заключается в том, что к статорной обмотке двигателя на период пуска подводится
пониженное напряжение. После разгона его дополнительные устройства от двигателя
отключаются.
Иногда для снижения напряжения,
подаваемого в обмотки статора, изменяют схему переключения обмоток. Например,
асинхронный двигатель нормально работает по схеме «треугольник». Если
на период пуска его обмотки включить «звездой», то на каждую фазу
придется напряжение в раз меньшее.
Двигатели с фазным ротором
пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные
сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении
частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять
плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока
еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько
обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4),
можно обеспечить различные частоты вращения магнитного поля (соответственно:
3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится
специальным переключателем.
Этот способ регулирования
ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое
применение (например, для привода продольно-строгального станка при рабочем
и обратном ходе).
Третий способ регулирования
частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение
скольжения S достигается введением в цепь ротора регулировочных сопротивлений.
Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования
вращения вала двигателя относится так называемое реверсирование, т.е. изменение
направления вращения на обратное. Осуществляется оно путем изменения порядка
чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления
вращения вала двигателя.
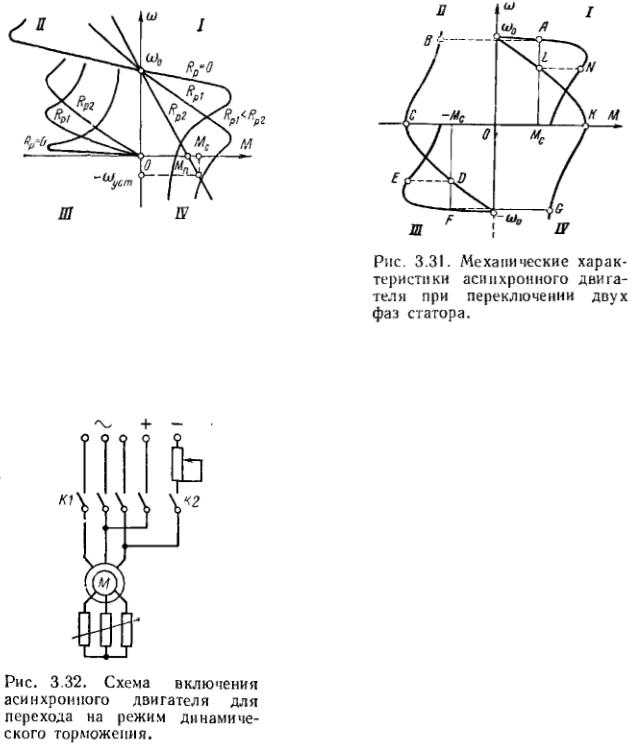
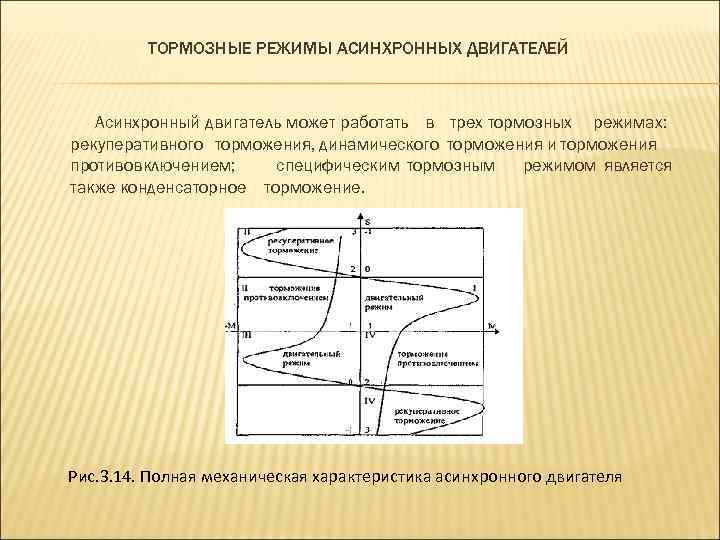
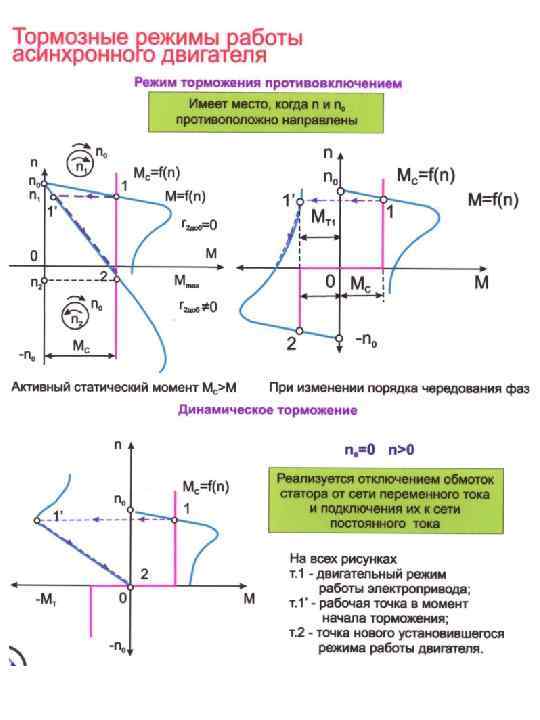
Торможение асинхронного двигателя может быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
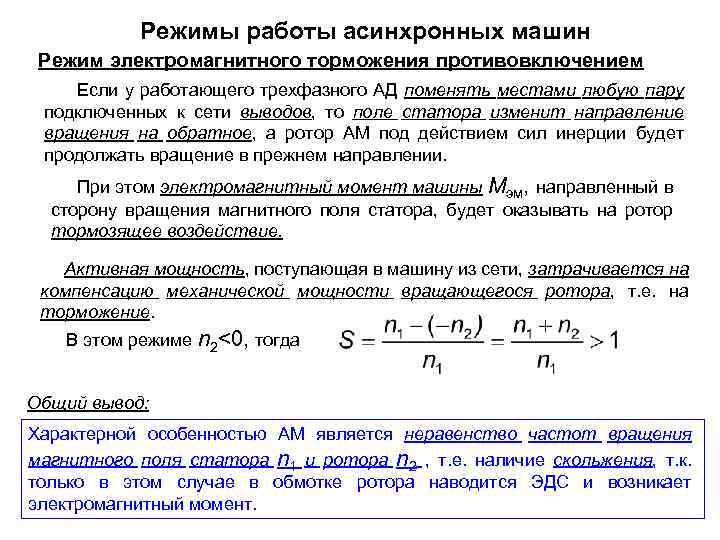
Иногда применяют электродинамическое
торможение, когда после отключения двигателя от сети переменного тока в его
обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно
сокращает выбег ротора.
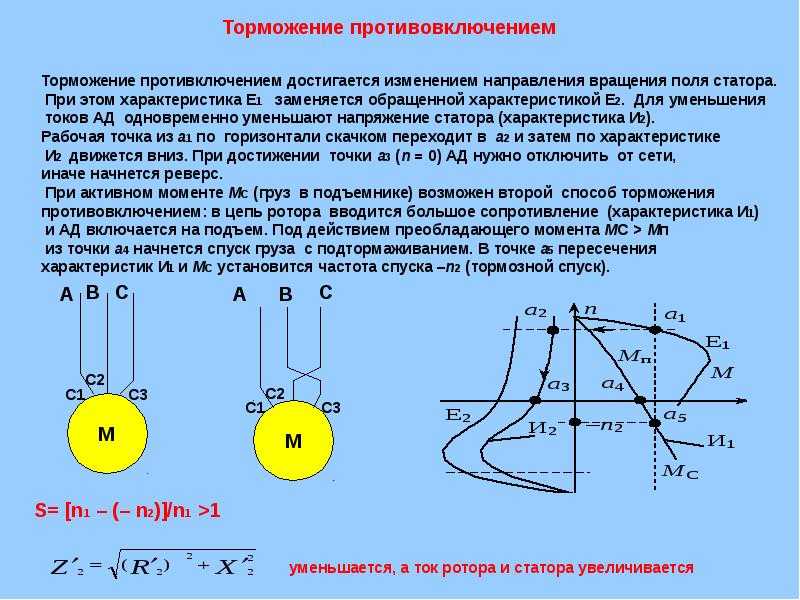
Чаще используется торможение
«противовыключением». После отключения двигателя от сети его кратковременно
включают на вращение в обратную сторону. Как только оставшаяся частота вращения
ротора n2 станет равной нулю, двигатель отключается от сети.
Электрические схемы
| Режим работы – прямой пуск электродвигателя, реверсивный (1 фидер).
Шкаф управления асинхронным двигателем предназначен для местного, дистанционного или автоматического управления одним электродвигателем (пуск электродвигателя, реверс и отключение вращающегося электродвигателя), работающим в продолжительном, кратковременном или повторно-кратковременном режимах.Реверс – это изменение направления вращения ротора. Для реверса необходимо изменить направление вращения магнитного поля статора, что в трехфазных асинхронных двигателях достигается переменой мест двух любых проводов на клеммах трехфазной сети.Ящик имеет местную индикацию состояния работы и возможность для подключения дистанционного управления и дистанционной индикации состояния работы фидера. №НаименованиеКодКол-во |
1SAM250000R1011 | 1 | |
| 2 | Боковые доп. контакты 1НО+1НЗ HK1-11 для автоматов типа MS116 | 1SAM201902R1001 | 1 |
| 3 | Контактор AF16-30-10-13 с универсальной катушкой управления 100-250BAC/DC | 1SBL177001R1310 | 2 |
| 4 | Клемма M4/6 винт 4мм.кв. серая | 1SNA115116R0700 | 6 |
| 5 | Клемма M4/6.N винт 4мм.кв. , синяя | 1SNA125116R0100 | 1 |
| 6 | Клемма M4/6.P винт 4мм.кв. Земля | 1SNA165113R1600 | 2 |
| 7 | Блокировка электромеханическая VEM4 для контакторов AF09…AF38 | 1SBN030111R1000 | 1 |
| 8 | Контактный блок CA5-10 1НО фронтальный для A9.. A110 | 1SBN010010R1010 | 4 |
| 9 | Контактный блок CA5-01 1Н3 фронтальный для A9.. A110 | 1SBN010010R1001 | 4 |
| 10 | Лампа CL-523G зеленый со встроенным светодиодом 230В AC | 1SFA619402R5232 | 2 |
| 11 | Кнопка CP1-30R-01 красная без фиксации 1HЗ | 1SFA619100R3041 | 1 |
| 12 | Кнопка CP1-30G-10 зеленая без фиксации 1HO | 1SFA619100R3012 | 2 |
| 13 | Переключатель ONU2PBR 3-х поз.(1-0-2) (двухуровневый) | 1SCA113972R1001 | 1 |
| 14 | Клемма MA2,5/5 винт 2,5мм.кв. оранжевая | 1SNA105075R2000 | 15 |
| 15 | Клемма MA2,5/5.N винт 2,5мм.кв. синяя | 1SNA125486R0500 | 2 |
| 16 | Изолятор FEM6 Торц. для MA2,5-M10 серый | 1SNA118368R1600 | 1 |
| 17 | Фиксатор BAM3 Торц. для рейки DIN3, универсальный | 1SNK900001R0000 | 2 |
| 18 | SR2 Корпус шкафа с монт.платой 400х300х150мм ВхШхГ | SRN4315K | 1 |
| 19 | Автомат.выкл-ль 1-полюсной S201 C6 | 2CDS251001R0064 | 1 |
| 20 | Провод, маркировка, расходные материалы | 1 |
Описание и свойства прямого пуска асинхронного электродвигателя
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на однолинейной электрической схеме. При включении контактора в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
максимальны. По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.
Значение пускового момента находится при s = 1:
Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться.
С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места.
В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
График изменения тока и момента при пуске асинхронного двигателя с короткозамкнутым ротором.
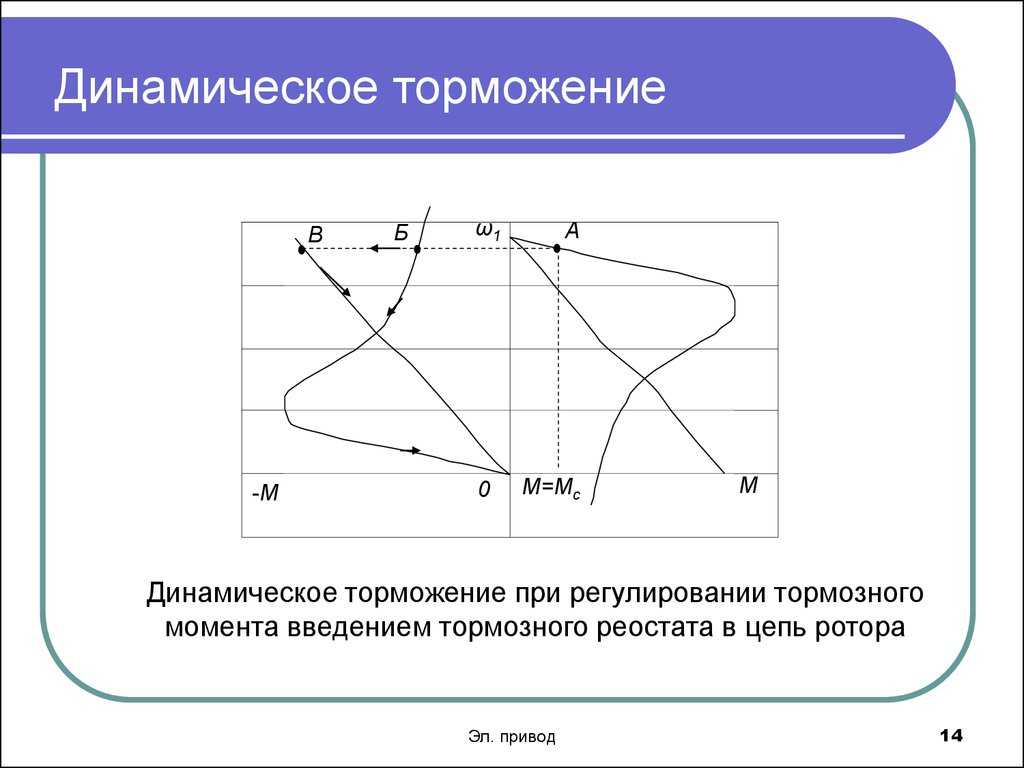
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Торможение двигателей постоянного тока
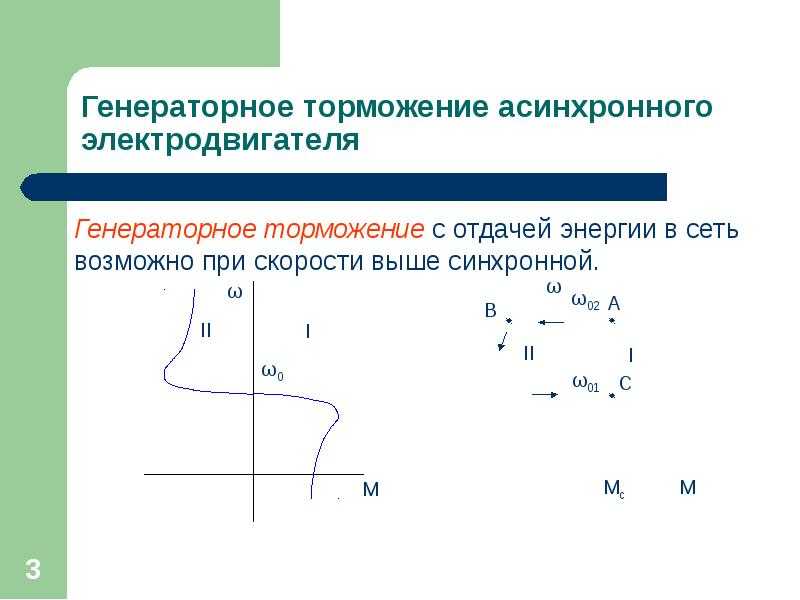
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
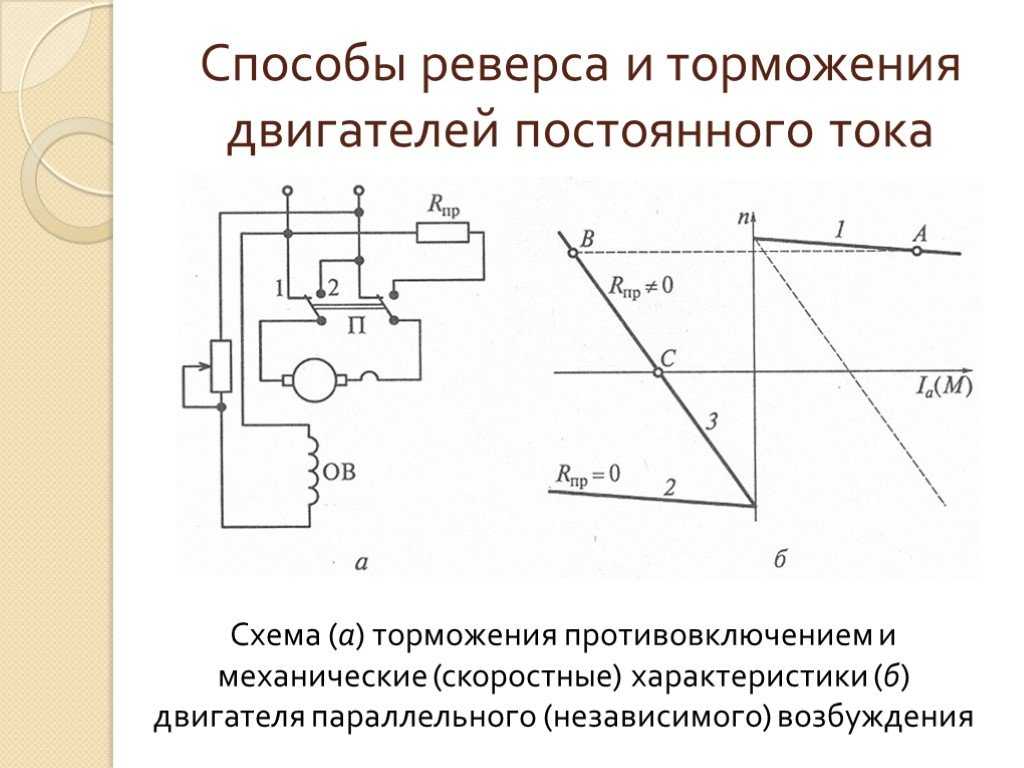

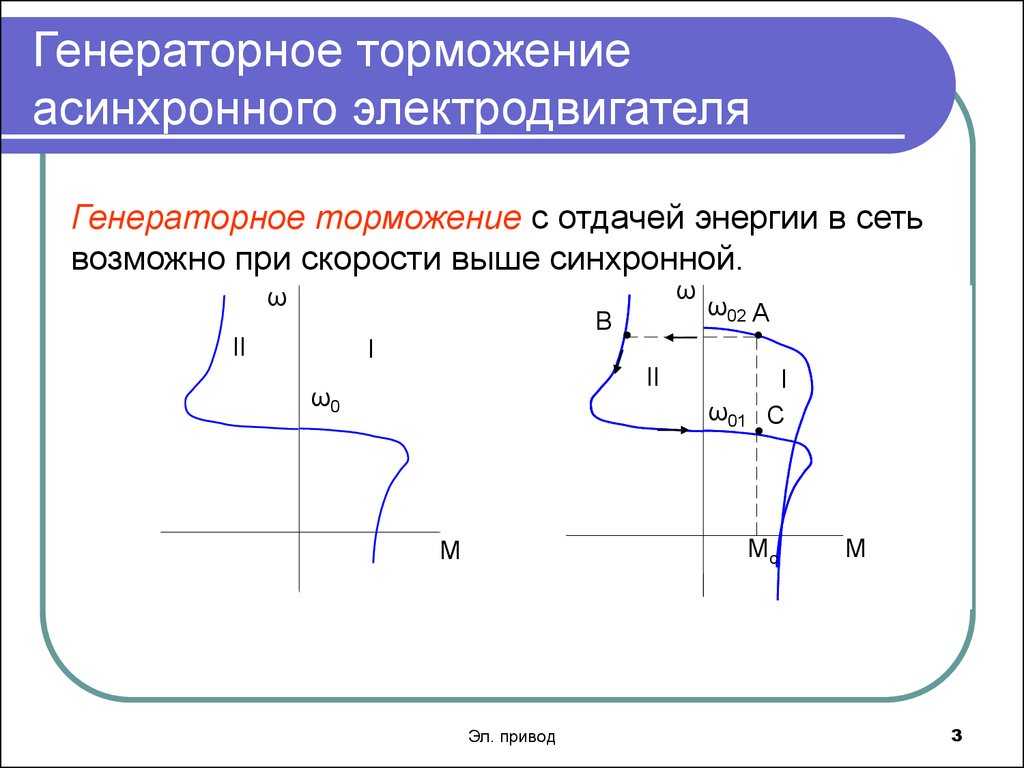
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным в озбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов.
![]()
Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах.
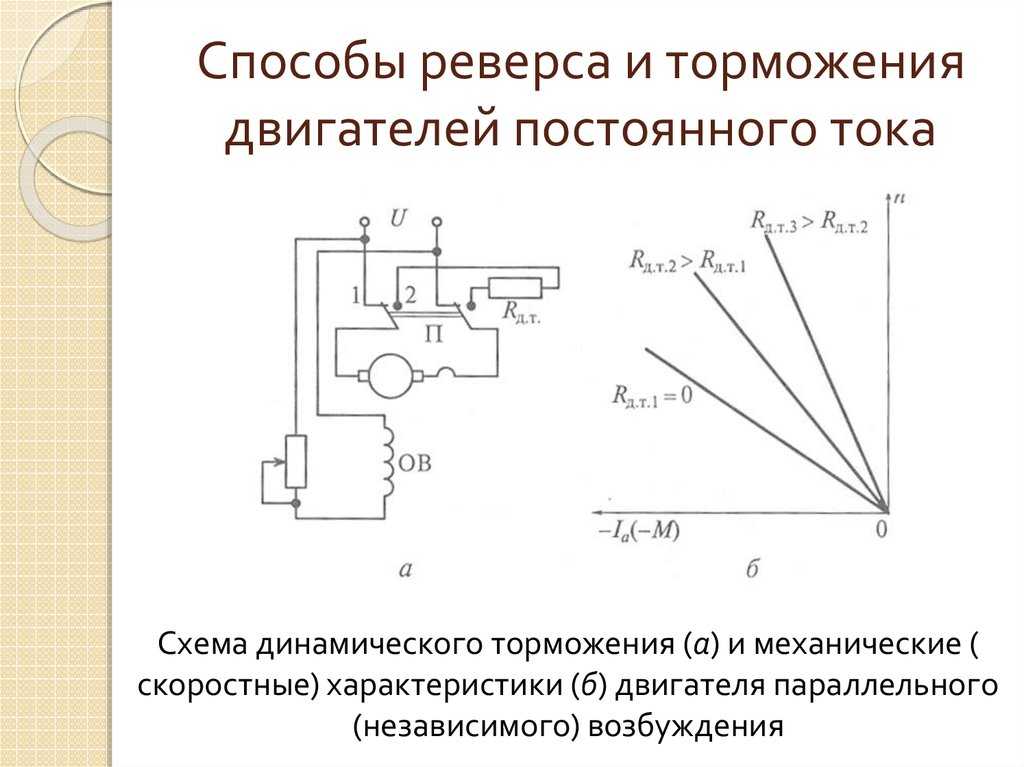
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря.
Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
21.Универсальные коллекторные двигатели — это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.
Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментов
DM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
https://youtube.com/watch?v=ezW4Gd5LJyg
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
https://youtube.com/watch?v=0XqFfNm7A3g
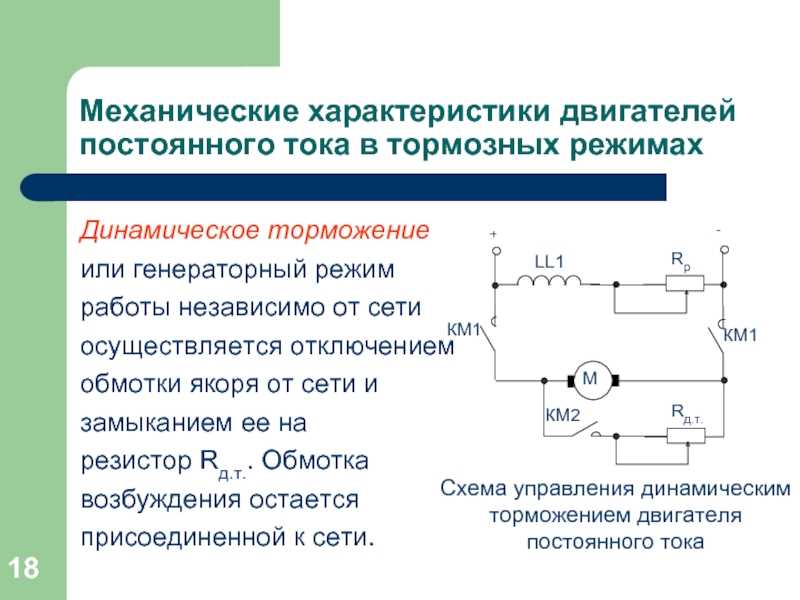
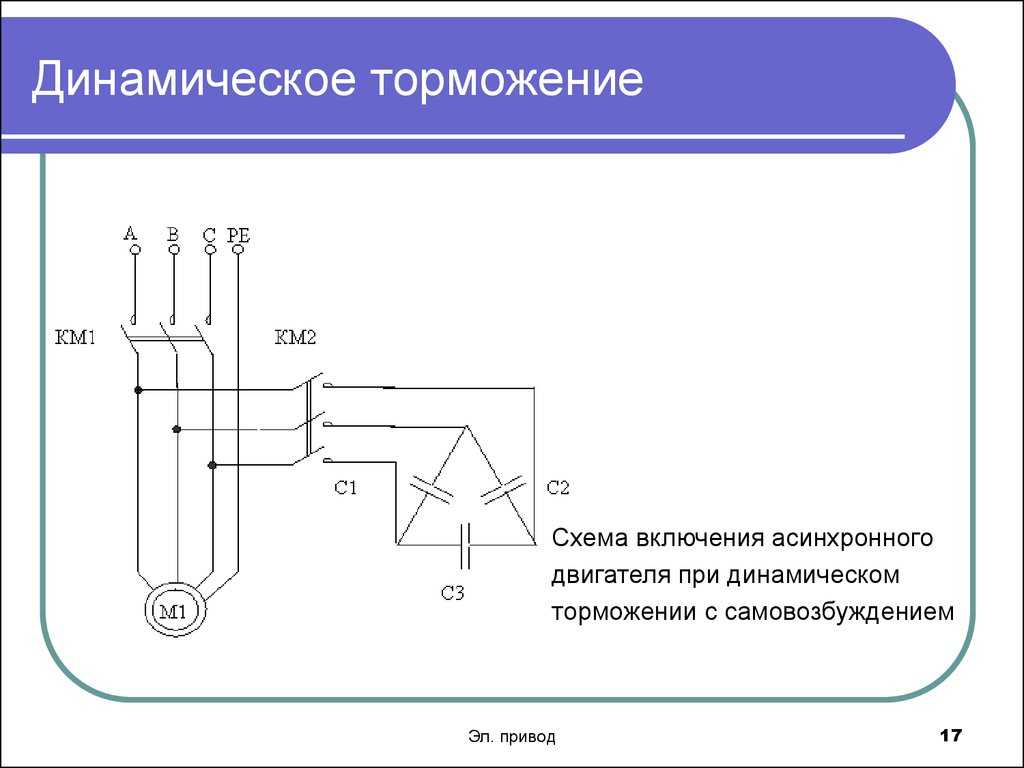
![]() Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Способы и схемы торможения электродвигателей
Торможение электродвигателя применяют, если необходимо сократить время свободного выбега и фиксацию механизма в конкретном положении. Существует несколько видов принудительной остановки устройства. Это механическое, электрическое и комбинированное. Механическое устройство представляет собой тормозной шкив, закрепленный на валу, с колодками. После отключения устройства колодки прижимаются к шкиву. За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
- Способы электрического торможения электроприводов
- Противовключения
- Динамическая остановка электропривода
- Режимы торможения моторов постоянного тока
- Рекуперативное торможение электрических машин
- Режим рекуперации в асинхронных электрических машинах
- Комбинированный режим
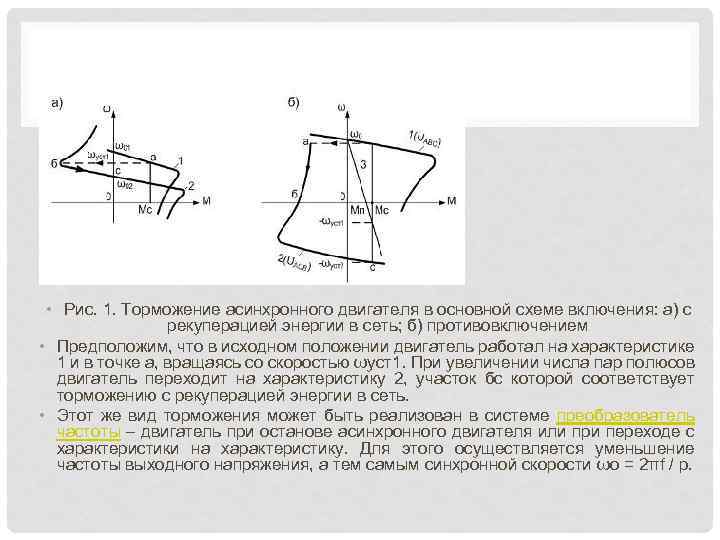
Реализация рекуперативного торможение асинхронного электродвигателя
Асинхронная машина, в принципе, как и все электрические машины, является обратимой. Это значит, что она может работать как в режиме двигателя, выполняя какую-то полезную работу, так и в режиме генератора – вырабатывая электрическую энергию.
Если к валу асинхронного электродвигателя приложить момент нагрузки, то преодолевая этот момент, машина будет потреблять энергию из сети. При работе на холостом ходу будет потребляться только энергия, необходимая для покрытия механических потерь в самой машине. Если к валу асинхронной машины подсоединить еще один электродвигатель и с его помощью вращать асинхронную машину, то потери в роторе будут компенсированы за счет приводного двигателя, а в случае, если скорость вращения вала асинхронной машины превысить синхронную частоту вращения (скорость вращения магнитного поля статора), то начнется рекуперация энергии в сеть. Давайте более подробно рассмотрим процесс рекуперации энергии в сеть.
При работе машины в двигательном режиме вращающееся магнитное поле пересекает проводники роторной и статорной обмотки в одинаковом направлении, следствием чего становится совпадение ЭДС статора Е1 и ротора Е2 по фазе. При переходе асинхронника в режим рекуперативного торможения магнитное поле пересекает проводники статора в прежнем направлении, а вот роторные проводники при n>n0 – в противоположном. При этом ЭДС ротора изменит свой знак на обратный и будет равна:
Соответственно ток ротора:
Отсюда следует, что при переходе в режим рекуперации направление изменит только активная составляющая роторного тока, реактивная не поменяет свое направление. Активный ток поменяет направление из-за изменения направления момента асинхронной машины, по сравнению с двигательным режимом.
Векторная диаграмма асинхронного электродвигателя в генераторном режиме:
![]()
Векторная диаграмма показывает, что между U и I1 угол сдвига фазы φ1>(π/2), что будет соответствовать режиму, в котором первопричиной появления тока I1 будет не напряжение питающей сети, а ЭДС Е1. Таким образом, статорная обмотка работает в режиме генератора, отдавая энергию в сеть.
Такие же выражения возможно получить и с помощью эквивалентной схемы. Активная составляющая роторного тока будет равна:
![]()
Это значит, что при ω>ω0, скольжение s изменит знак, соответственно поменяет знак I2a/, что значит переход машины в режим рекуперативного торможения. Это подтверждает и выражение электромагнитной мощности:
Данное выражение показывает, что при переходе в режим рекуперативного торможения мощность электромагнитная изменяет свой знак, что означает отдачу мощности вторичным контуром.
Обратившись к выражению мощности вторичного контура:
![]()
Из этого выражения мы можем увидеть, что знак реактивной мощности будет сохранятся независимо от режима работы.
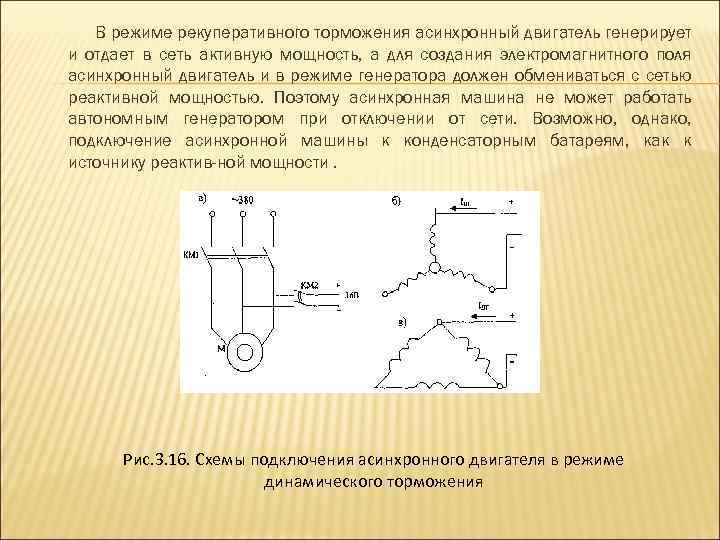
Это значит что – асинхронный электродвигатель в рекуперативном режиме тоже потребляет реактивную мощность. И чтоб осуществить рекуперацию, необходим источник реактивной мощности, который необходим для создания вращающегося магнитного поля.
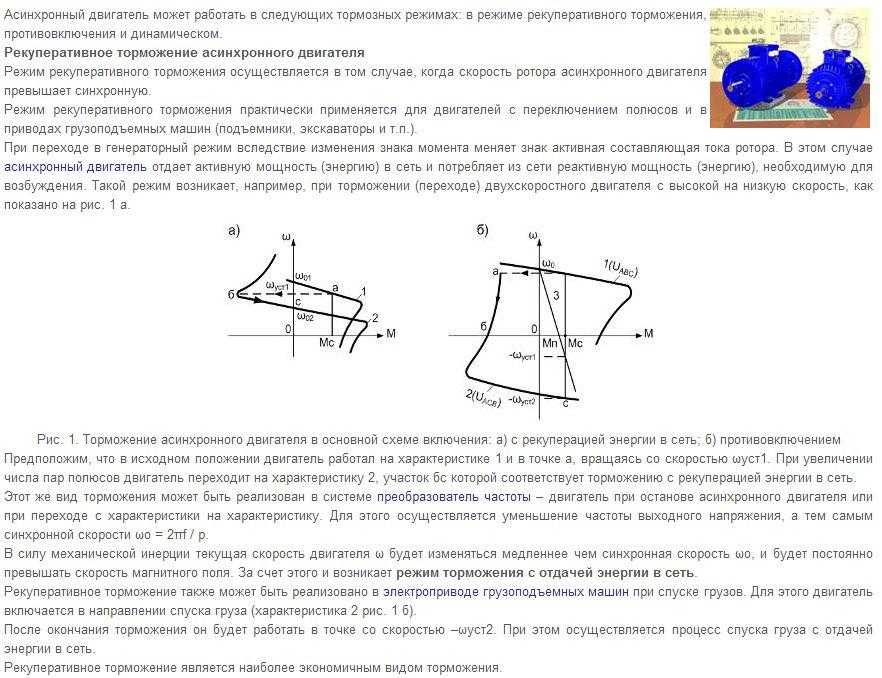
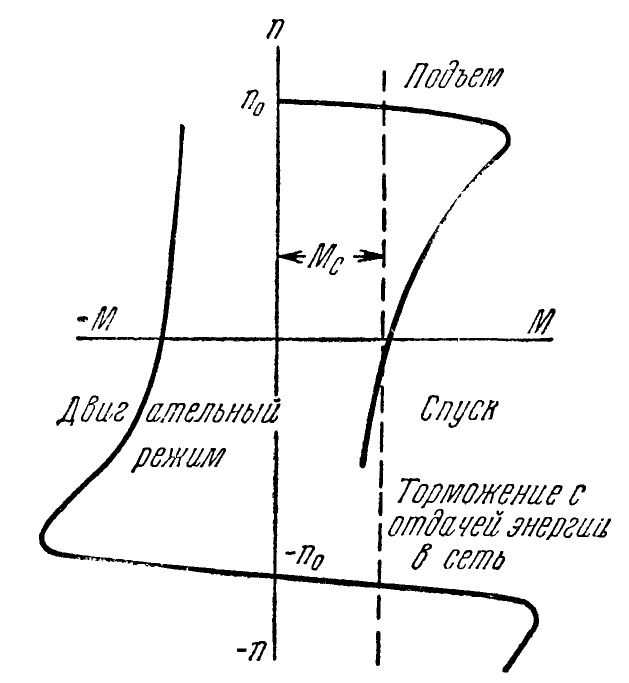
Рекуперативное торможение часто используют в подъемно-транспортных механизмах, при спуске тяжелых грузов. Груз, который опускается, развивает на валу машины отрицательный момент и скорость становится n>n0. Таким образом, машина переходит в режим рекуперативного торможения и тем самым создает тормозной момент на валу. В точке пересечения характеристики со значением статического момента скорость двигателя устанавливается, и груз опускается с постоянной скоростью, как это показано ниже:
![]()
тормозной момент будет отсутствовать в том случае, если момент на валу машины будет больше, чем критический момент этой же машины.
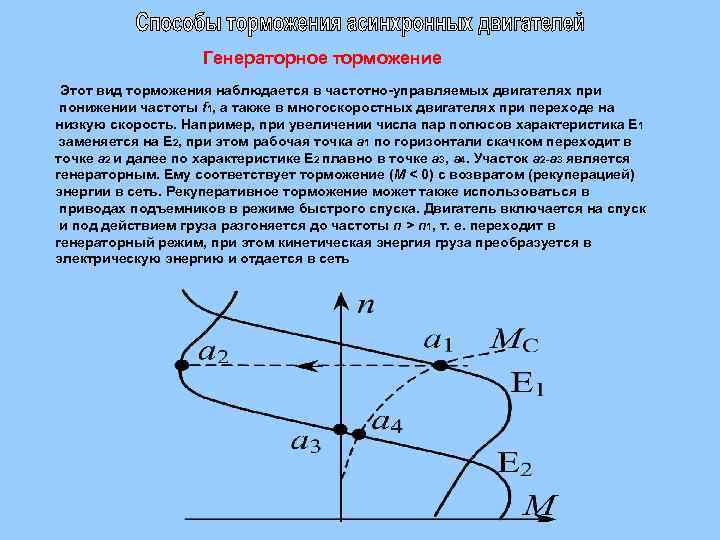
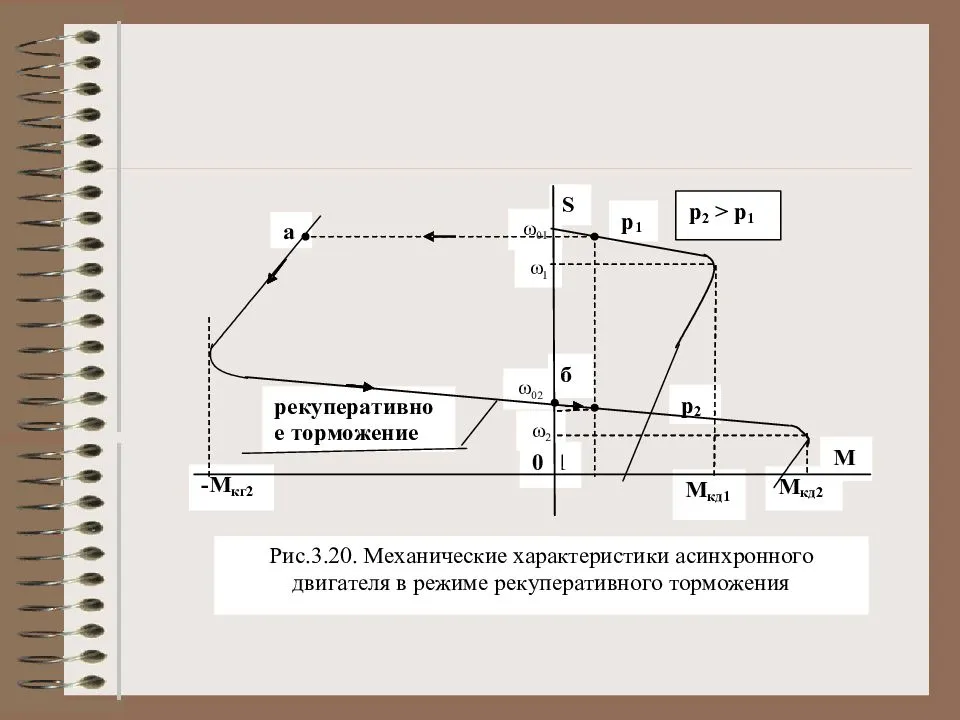
Рекуперативное торможения при наличии на валу асинхронной машины реактивного статического момента возможно только при наличии преобразователя частоты или двигателя, с переключающимся числом пар полюсов. Рассмотрим для двигателя с переключающимся числом пар полюсов.
Если обмотки статорные двигателя, работающего на высокой скорости
То есть число пар полюсов меньше, переключить на большее число пар полюсов р1, то в таком случае скорость вращения вала асинхронной машины станет больше, чем синхронная скорость, соответствующая новому числу полюсов
Машина перейдет в режим генератора:
![]()
На рисунке, область рекуперативного торможения соответствует участку BCD на механической характеристике.
Довольно часто такой способ применяют в металлорежущих станках, в которых применяю асинхронные машины с переключающимся количеством пар полюсов.
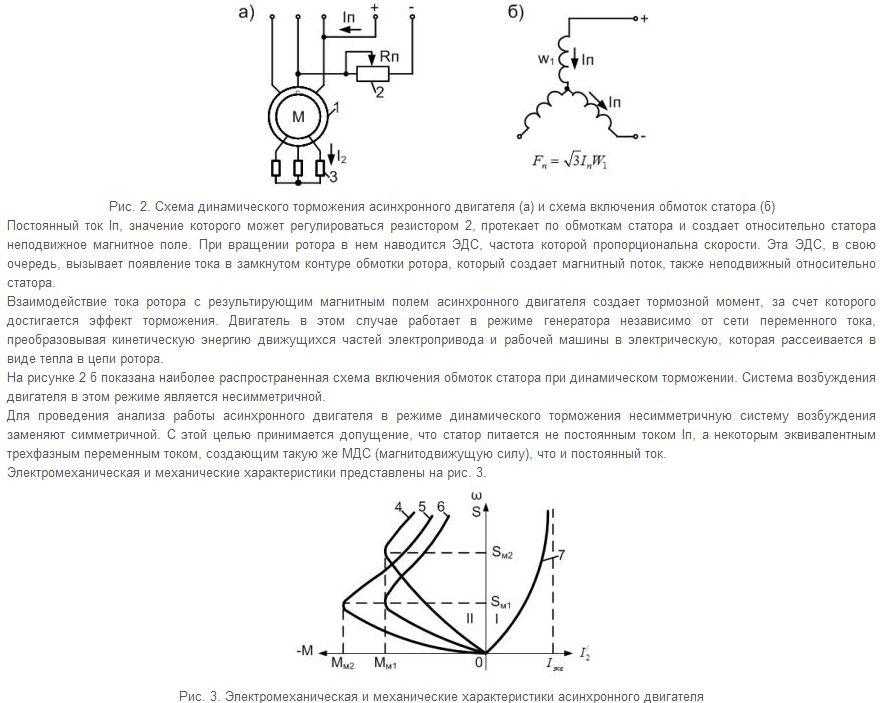
Динамическое торможение асинхронного двигателя
Осуществляется путем подачи постоянного тока в статор асинхронного двигателя после отключения статора от сети переменного тока контактором КМ1.
Динамическое торможение можно осуществлять как для двигателя с короткозамкнутым ротором, так и для двигателя с фазным ротором. Причем у двигателя с фазным ротором сопротивление в цепь ротора может быть включено или ротор замкнут накоротко без сопротивлений.
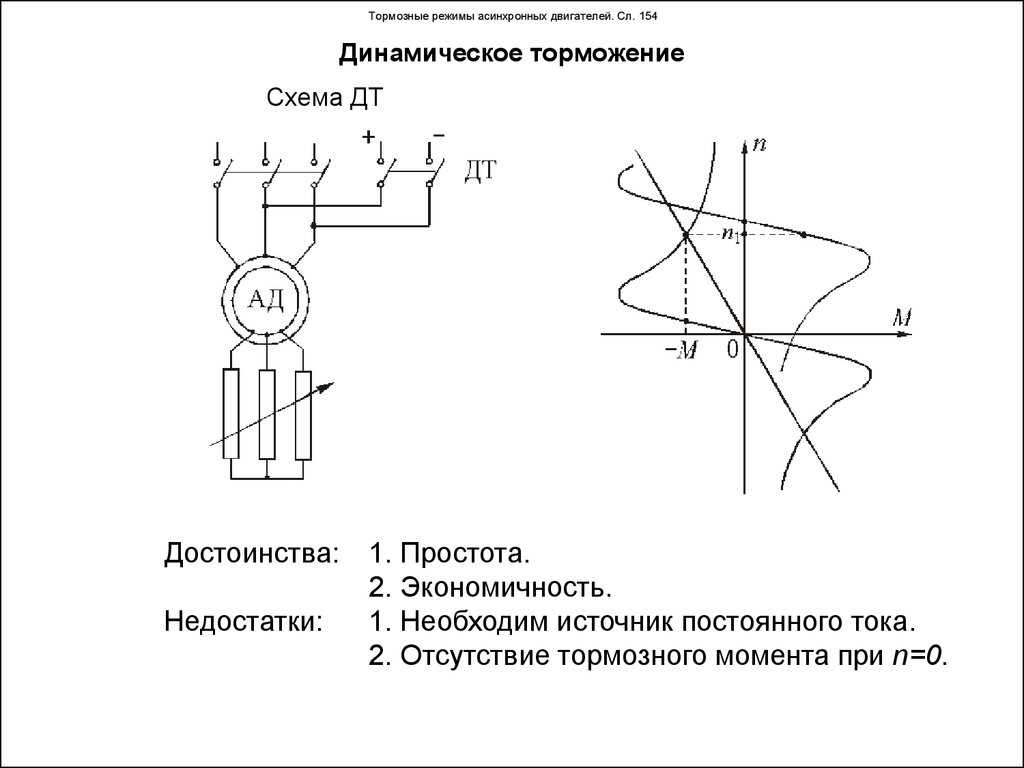
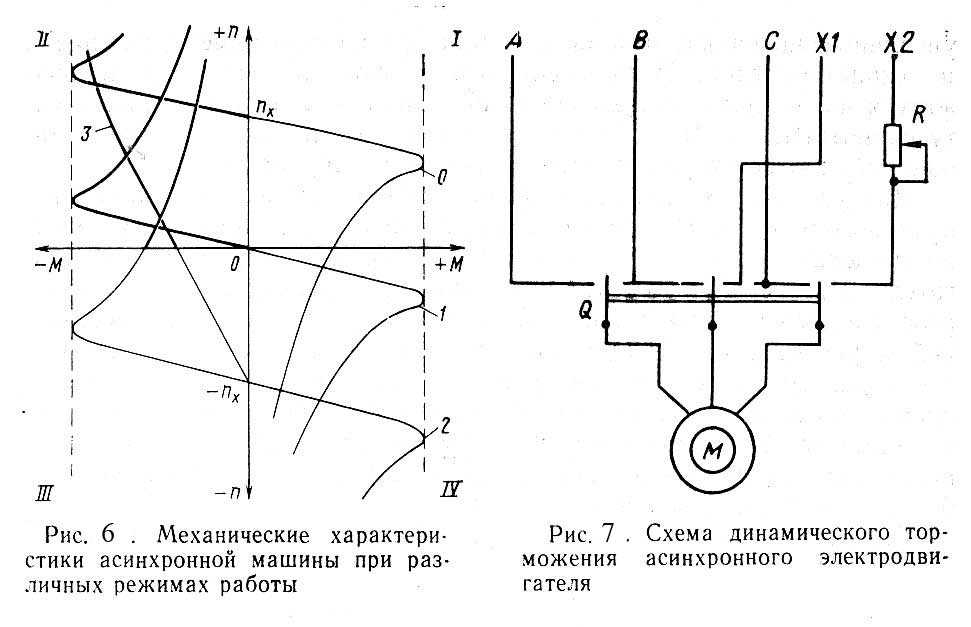
Схема динамического торможения асинхронного двигателя.
Тормозная характеристика асинхронного двигателя при динамическом торможении: кривая 7 — электромеханическая характеристика, кривые 4-6 механические характеристики.
При подаче постоянного тока в две фазы обмотки статора в воздушном зазоре асинхронного двигателя создается постоянное магнитное поле. Когда ротор попадает в это поле, в нем наводится постоянная ЭДС, направленная навстречу ЭДС вращающего магнитного поля, и ротор притормаживается.

При этом торможении двигатель работает в режиме генератора, независящего от сети переменного тока и преобразует кинетическую энергию движущихся частей электропривода в электрическую энергию, которая рассеивается в виде тепла в цепи ротора.
Процессом динамического торможения можно управлять, то есть изменять время торможения двумя способами. У асинхронных электродвигателей с короткозамкнутым ротором можно изменять тормозной ток. Для двигателей с фазным ротором можно изменять величину добавочного сопротивления в цепи ротора.
Недостатком динамического торможения является несимметрия магнитного поля при торможении, так как постоянный ток попадает только в две фазы. Несимметрия приводит к вибрации машины во время торможения.
В машинах мощностью более 100 кВт, чтобы избежать вибрации, с помощью усложнения силовой схемы подают постоянный ток во все три фазы. Но это очень усложняет и удорожает привод.
Источник
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
![]()
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока