5.9. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали
Pсl, а также потери в обмотке статора Рэ1:
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2‘=Рэм-Рэ2
Воспользовавшись ранее полученной формулой
запишем выражение полной механической мощности:
тогда
или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину
механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия
есть отношение мощности на валу P2 к потребляемой мощности P1:
Тепловое действие пускового тока
Если перейти к формулам, пусковой ток оказывает тепловое действие на электродвигатель, которое описывается так называемым интегралом Джоуля. Если по простому, то тепловая энергия, производимая электрическим током, пропорциональна квадрату тока, умноженному на время. Обозначается эта величина через I2t.
Хорошая новость в том, что защитный автомат имеет примерно такую же тепловую (время-токовую) характеристику, что и время-токовая характеристика разгона двигателя.
Сравните:
![]()
Время-токовые характеристики защитного автомата
Что видим? Для защиты двигателя используются в основном автоматы с характеристикой D, как раз для того, чтобы меньше реагировать на кратковременные перегрузки. Подробнее здесь.
А для пускового тока двигателя график будет примерно такой:
![]()
График пускового тока (теоретический) при Кп = 6
Линейность графика – условная. Всё зависит от изменения момента нагрузки в процессе разгона. Теоретический график показан пунктиром. На этом графике Кп = Iп / Iн = 6, но это теоретическое (табличное) значение. Время разгона до номинала = tп.
Реальный график начерчен сплошной линией. На нём Iп` – это реальное значение пускового тока, которое всегда меньше теоретического. Это обусловлено тем, что питающая сеть имеет не нулевое сопротивление, и при повышении тока на проводах возникают потери напряжения.
Понятно, что из-за потерь время разгона будет больше, оно обозначено на графике через tп`.
Теперь повернём последний график, чтобы привести оси к одной системе координат:
![]()
Время от тока, если можно так выразиться
Не правда ли, весьма похоже на время-токовую характеристику защитного мотор-автомата?
Получается, что обе характеристики компенсируют друг друга, и при выборе автомата достаточно настроить его уставку на номинальный ток двигателя. При особо тяжелых пусках, когда площадь под кривой пуска двигателя больше площади под кривой защитного автомата, стоит подумать о плавном пуске – УПП либо ПЧ.
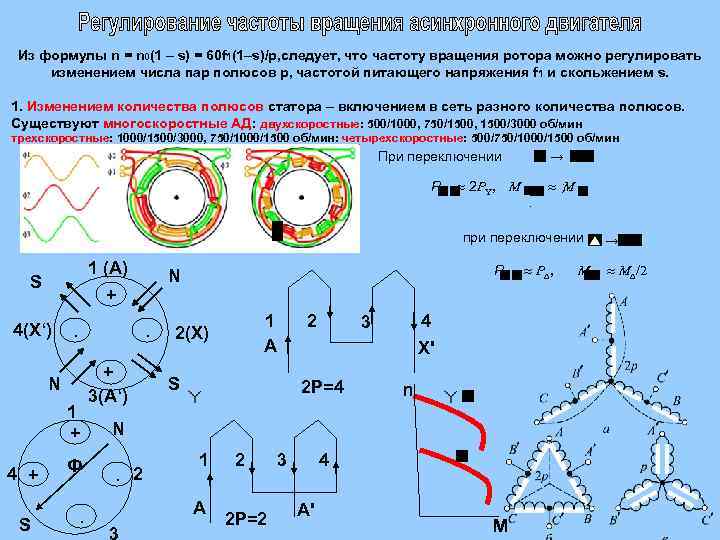
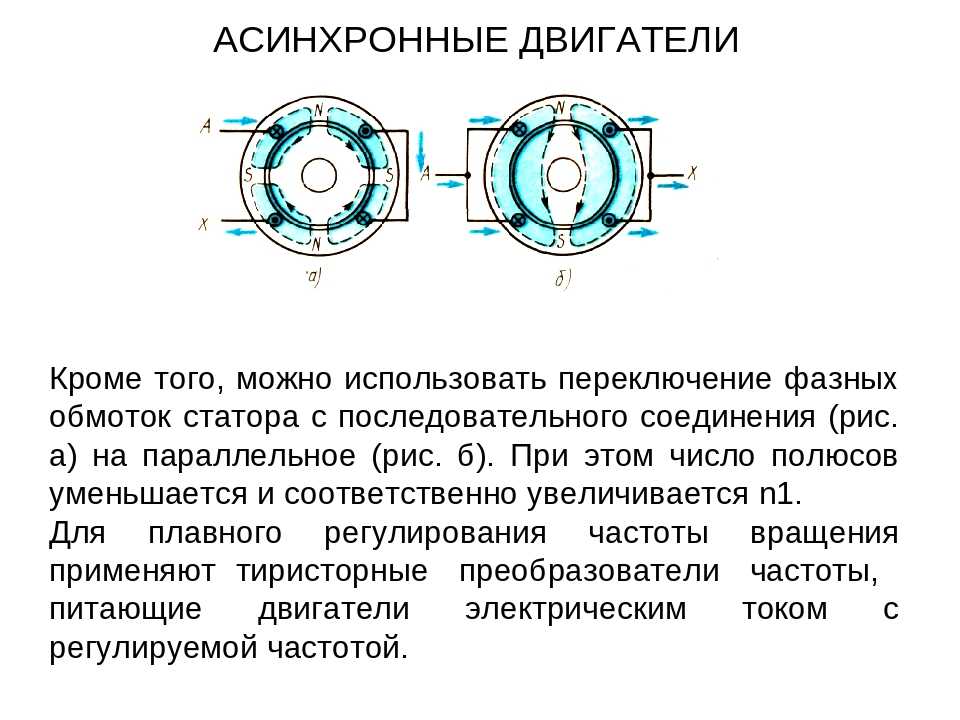
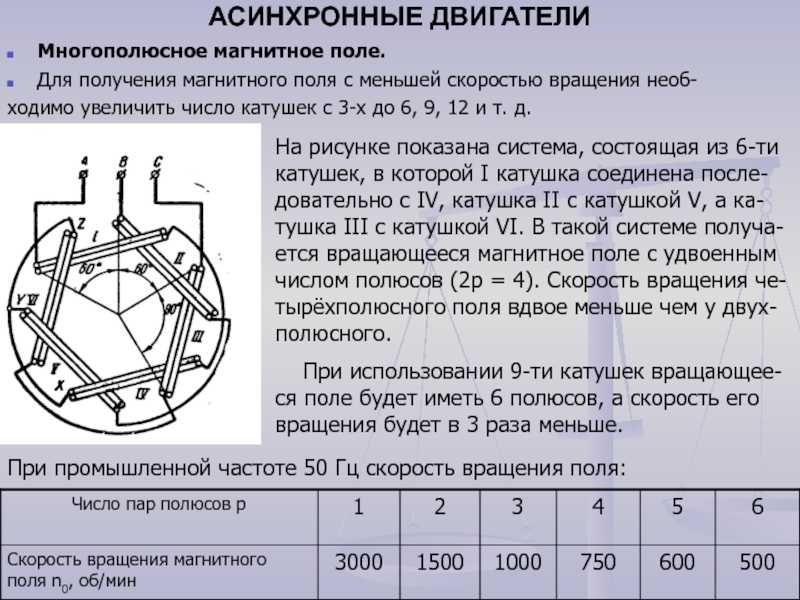
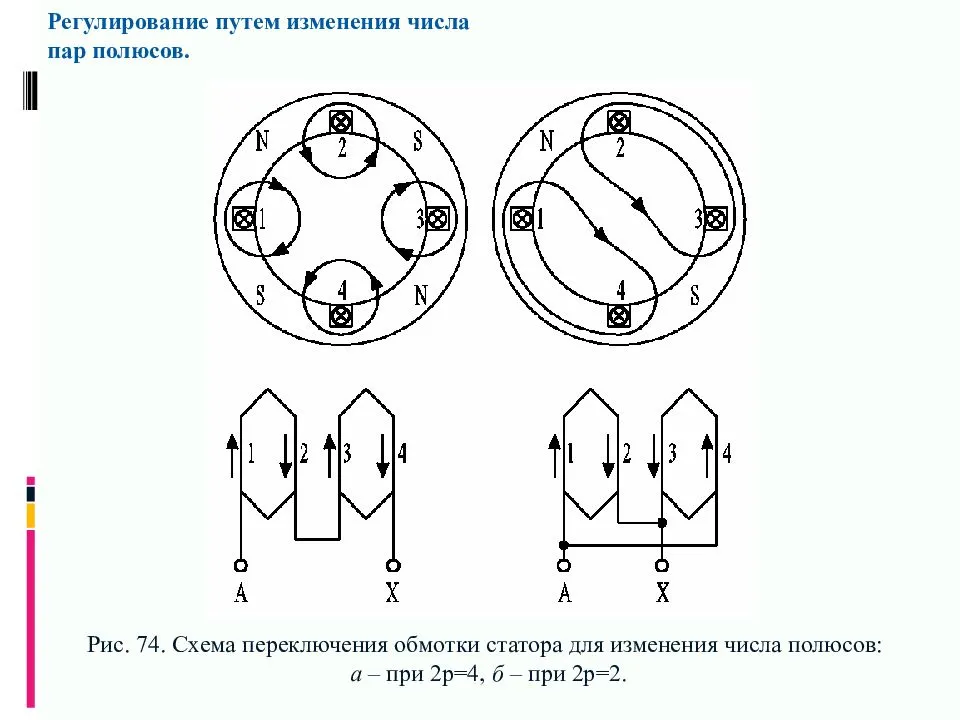
Полюса
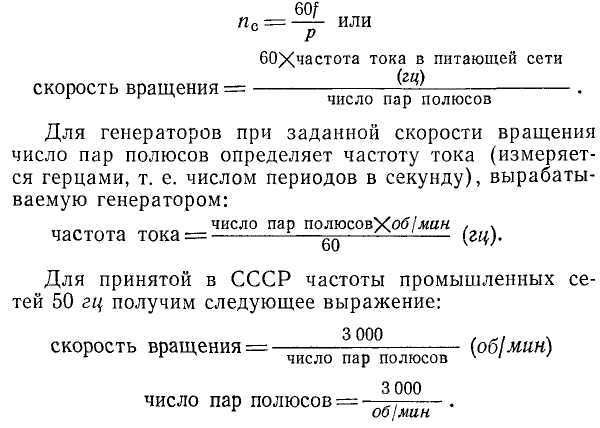
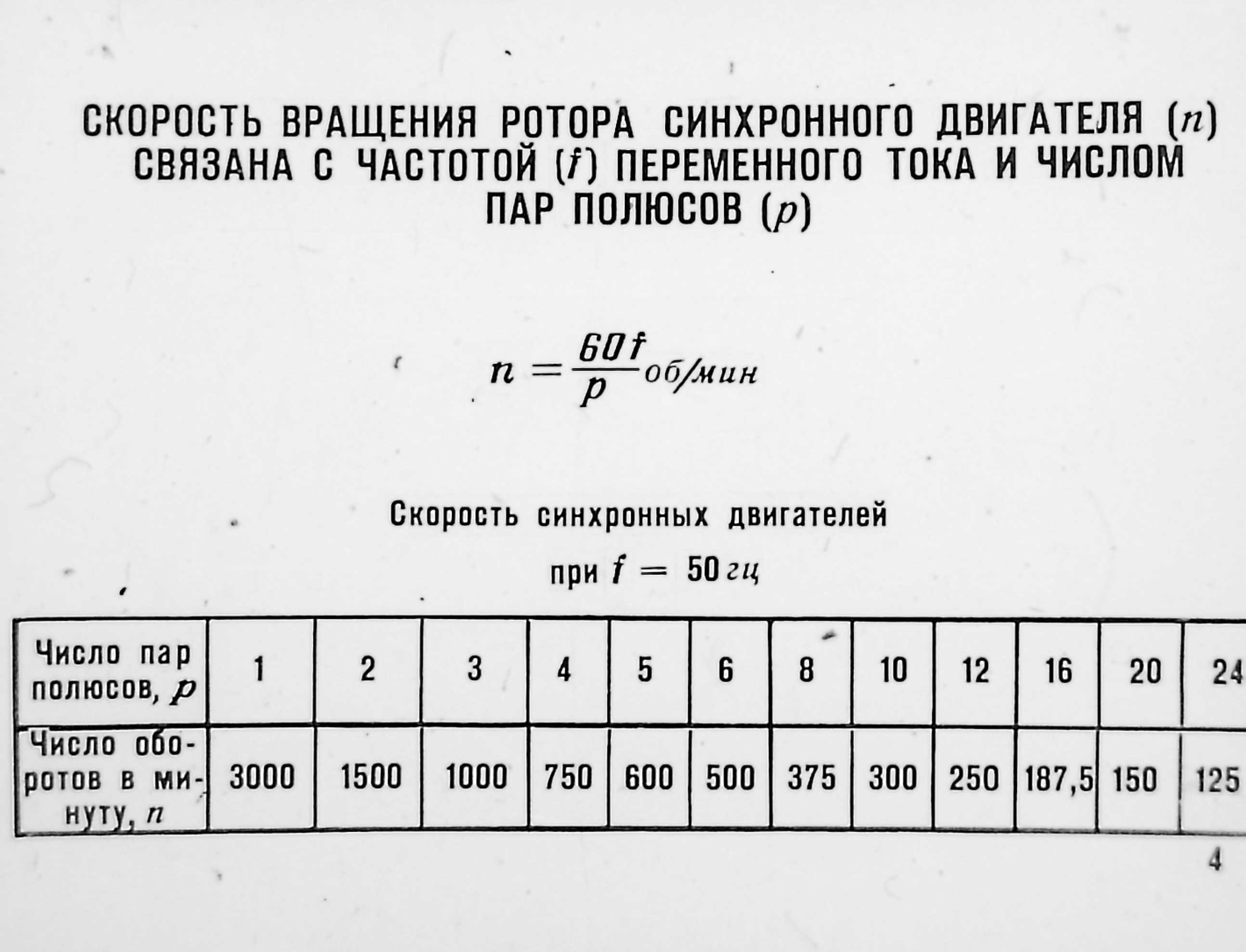
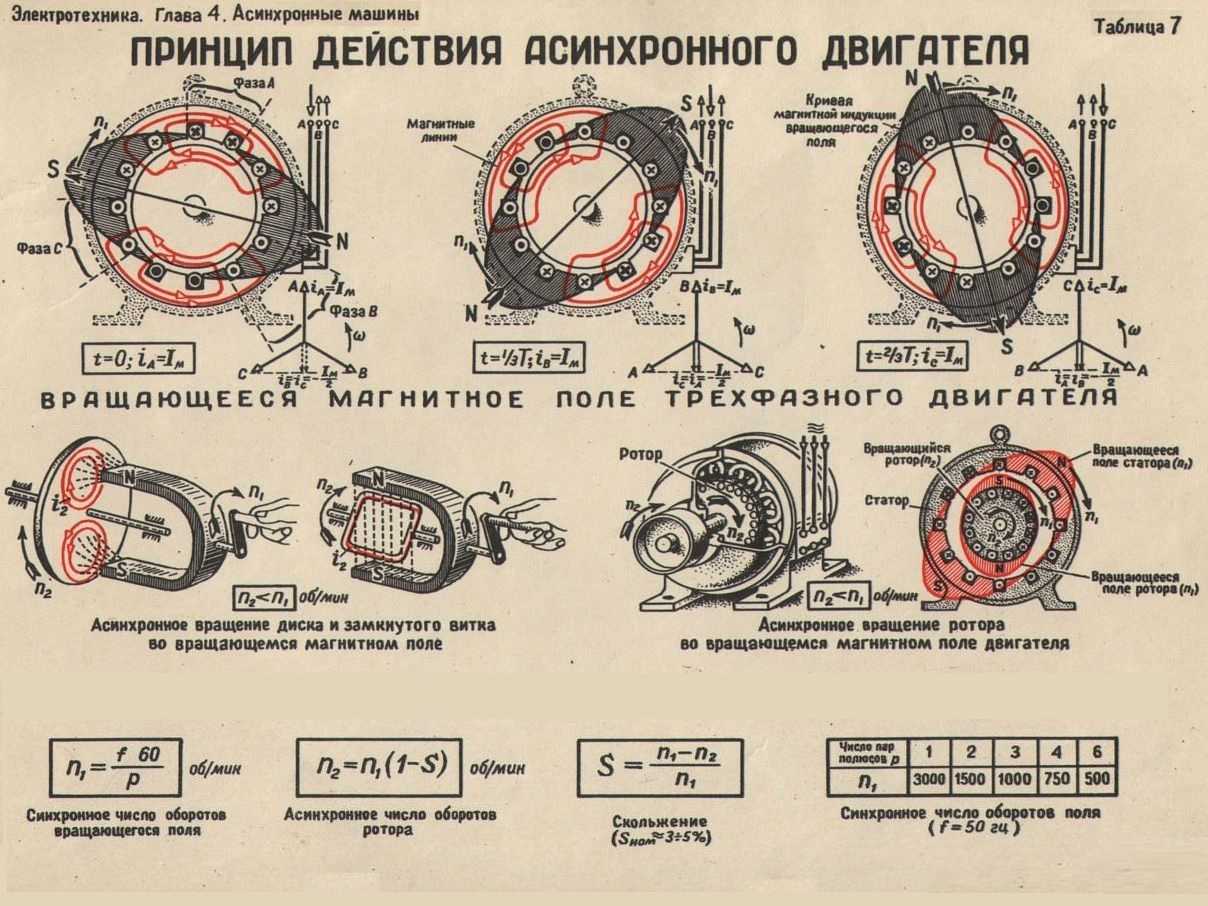
Статор электродвигателя имеет сразу несколько пар катушек (р), которые подключаются к сетевому напряжению с определенным показателем частоты (f). В статоре создается намагниченное поле, которое в процессе работы вращается синхронно. Его рабочая скорость полностью соответствует частоте сети питания и рассчитывается по формуле ns = 60ф/п.
Это поле магнитного действия, вызывает напряжение в обойме ротора (которая представляет собой спрессованные листы, на которые нанесена медная или алюминиевая обмотка). Сгенерированный ток и поток магнитов вызывают вращения якоря. Если же ротор вращается с синхронной скоростью, он не будет вращаться по отношению поля, имеющего место в статоре. В якоре не будет индуцироваться напряжение, и сила, вращающая ротор, уменьшится.
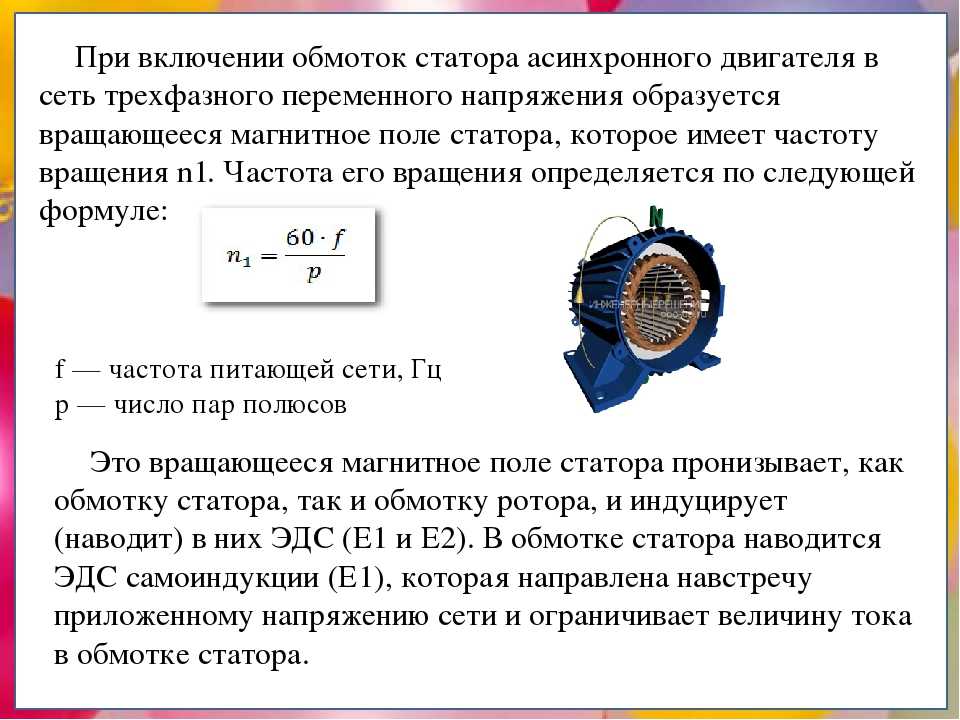

Поэтому вал асинхронных двигателей всегда вращается с асинхронной скоростью относительно оперативности статорного МП. Отличия между этими скоростными данными называются скольжением, которое обычно варьируется в диапазоне от 3 до 5%.
Разница по сравнению с синхронной скоростью напрямую зависит от типа конструкции мотора, его эффективности. Далее мы все эти пункты рассмотрим подробнее.
![]() Асинхронный двигатель с экранированными полюсами схема
Асинхронный двигатель с экранированными полюсами схема
Мощность электродвигателя
Электрическая мощность – это физическая величина, которая характеризуется скоростью преобразования ну или передачи электрической энергии. Чтобы облегчить понимание движение тока электрики представляют, как передвижение жидкости по трубе, а напряжение – с разницей положения ярусов этой жидкости. Электричество, так же, осуществляя работу, передвигается от высокой возможности к низкой, как и жидкость. Значит мощь электрики это количество работы, некая совершается за 1 секунду, или быстрота выполнения самой работы. Сумма тока электрики, которая прокладывается сквозь поперечный разрез цепи на протяжении одной секунды, это и есть сила тока в самой цепи.
Отсюда вытекает, что мощность электрическая равна в пропорции напряжению и силе тока в цепи. Для определения мощи тока принята единица – ватт, сокращенно — Вт. Для физических подсчетов принято было применять стандартную формулу N=A/t, где N – мощность, A – работа, t – время. Существует много вариантов данной формулы с разными буквенными обозначениями.
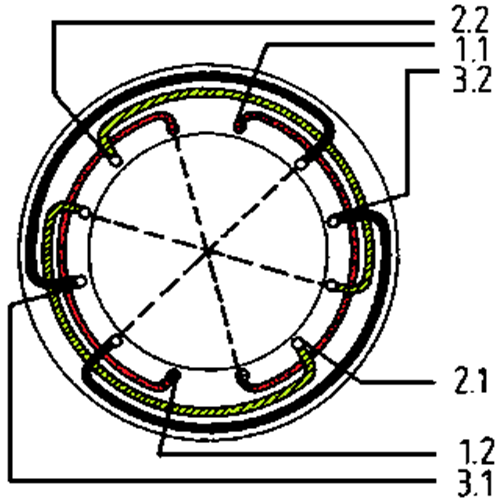
5.16. ОДНОФАЗНЫЙ ДВИГАТЕЛЬ С ЯВНО ВЫРАЖЕННЫМИ ПОЛЮСАМИ
Для создания вращающего момента в однофазных асинхронных
двигателях иногда применяют конструкцию с явно выраженными полюсами и однофазной
обмоткой. Полюса 1 (рис. 5.16.1) имеют расщепленную конструкцию, причем на одну
из половинок каждого полюса надет короткозамкнутый виток в виде медного кольца
2. Ротор также короткозамкнутый. При подключении обмотки статора к сети под
действием создаваемого ею пульсирующего магнитного потока в витке возникает
ток, который препятствует нарастанию потока в этой части полюса.
В результате потоки в обеих
частях каждого полюса оказываются сдвинуты по фазе относительно друг друга,
что в свою очередь приводит к образованию в двигателе вращающего магнитного
поля. Однофазные двигатели применяют в некоторых типах вентиляторов, электропроигрывателях
и т.д.
Способы измерения
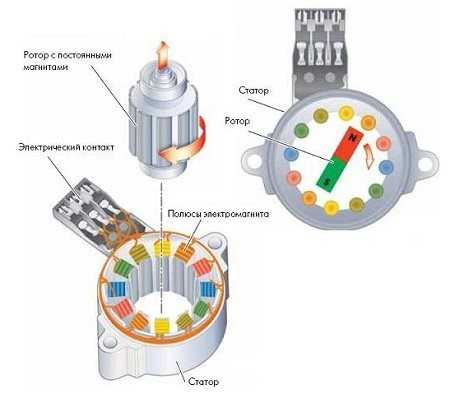
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Источник
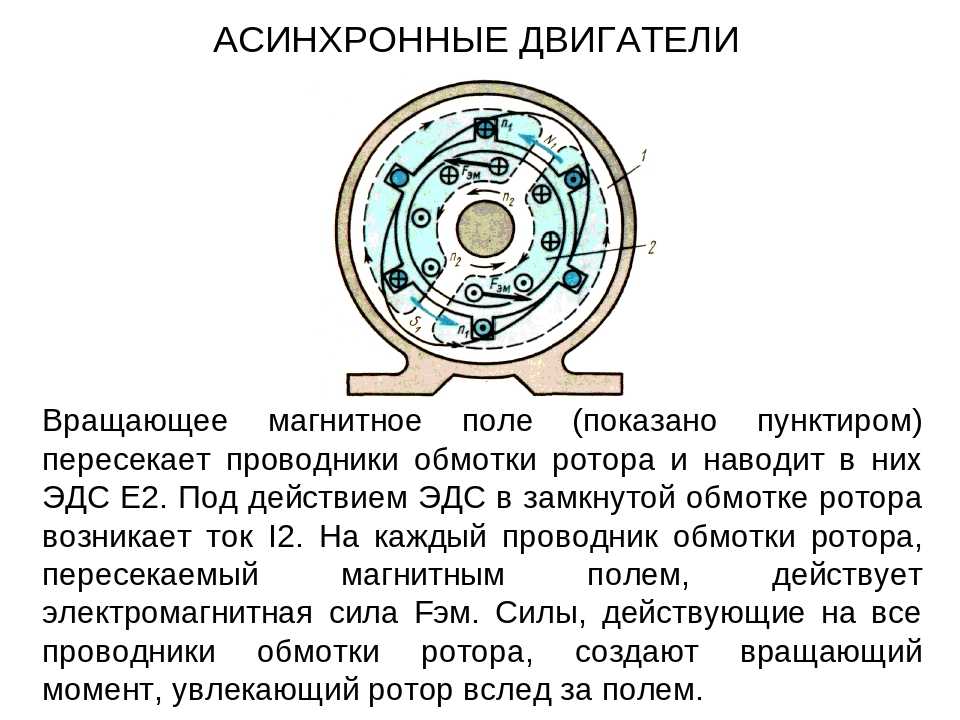
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Температура электродвигателя
При изменении температуры сопротивление обмоток меняется, поэтому температура двигателя при измерении должна быть 20°С или сопротивление необходимо пересчитывать по специальным таблицам. Для измерения температуры используются встроенные или дополнительно устанавливаемые внутренние температурные датчики. Их количество зависит от мощности электромашины:
- до 10кВт — 1шт;
- 10-100кВт — 2шт;
- 100кВт-1мВт — 3шт;
- более 1мВт — 4шт.
Температурой аппарата считается среднее значение показаний. При измерении сопротивления двигателя, не работавшего длительное время, его температурой считается температура окружающей среды. При этом она не должна меняться в течение нескольких дней перед началом измерений больше, чем на 5°С. Измерения производят несколько раз с перерывом не менее 2 часов. Если результат меняется, то следует подождать до приобретения электромашиной температуры окружающей среды.
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший для теоретического изучения) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно. Добавлю, что есть клещи с функцией Inrush, которые могут измерять пусковой ток от 0 до максимума в течение времени интегрирования порядка 100 мс.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.
Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
Способы определения характеристик электромотора.
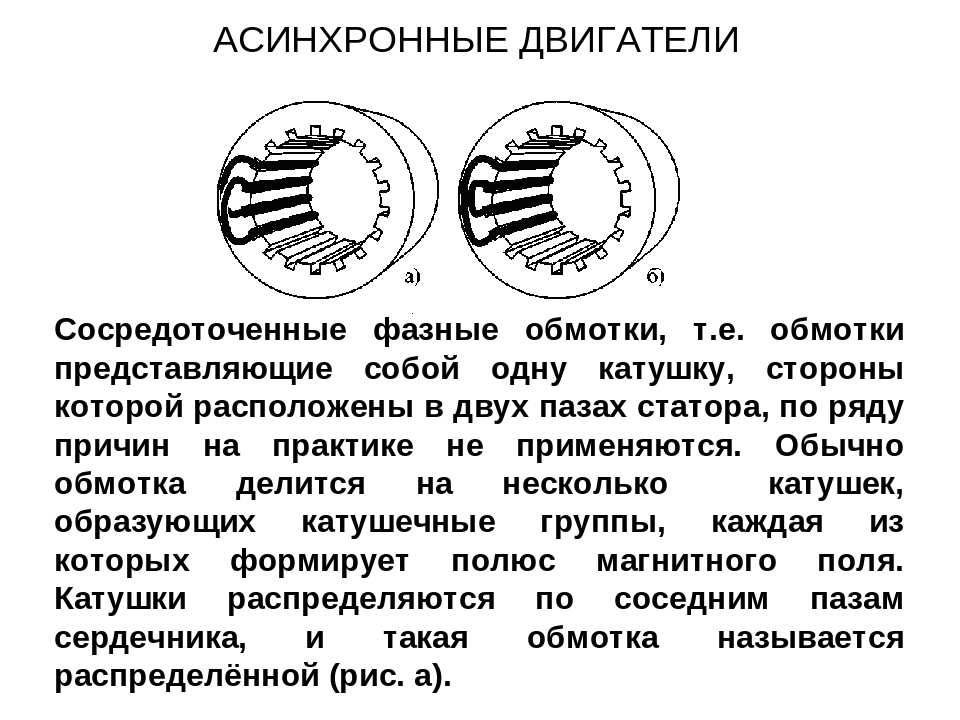
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
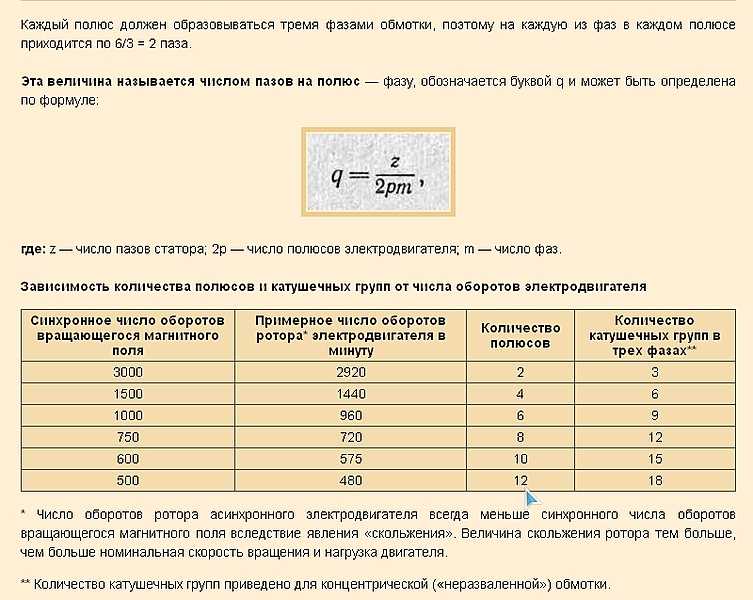
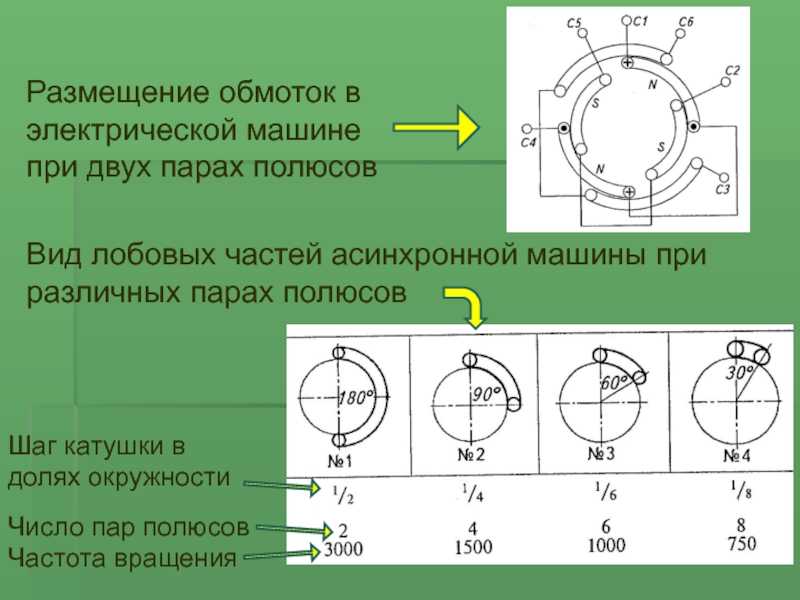
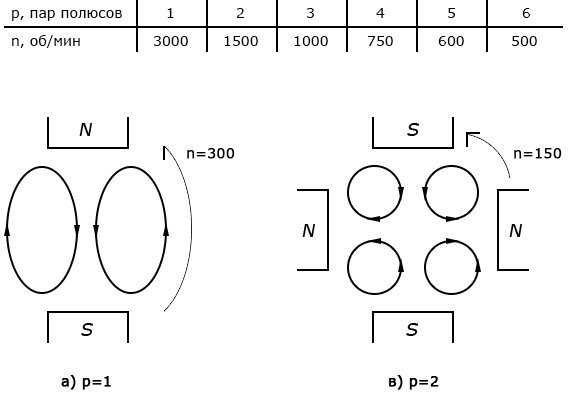
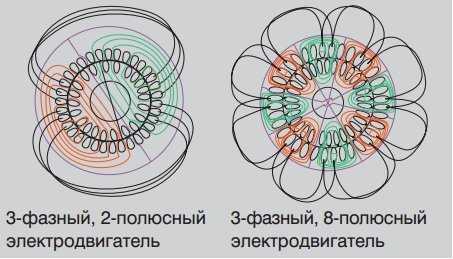
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая — мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты — это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
Источник
Как определить частоту вращения электродвигателя?
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.

Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
![]()
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | |
| 1,5 | 22 | 22 | 24 | 28 |
| 2,2 | 24 | 28 | 32 | |
| 3 | 24 | 32 | ||
| 4 | 28 | 28 | 38 | |
| 5,5 | 32 | 38 | ||
| 7,5 | 32 | 38 | 48 | |
| 11 | 38 | 48 | ||
| 15 | 42 | 48 | 55 | |
| 18,5 | 55 | 60 | ||
| 22 | 48 | 55 | 60 | |
| 30 | 65 | |||
| 37 | 55 | 60 | 65 | 75 |
| 45 | 75 | 75 | ||
| 55 | 65 | 80 | ||
| 75 | 65 | 75 | 80 | |
| 90 | 90 | |||
| 110 | 70 | 80 | 90 | |
| 132 | 100 | |||
| 160 | 75 | 90 | 100 | |
| 200 | ||||
| 250 | 85 | 100 | ||
| 315 | — |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями
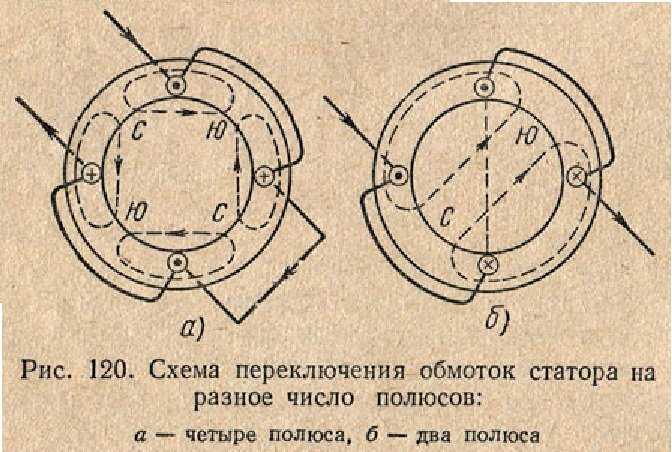
В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя
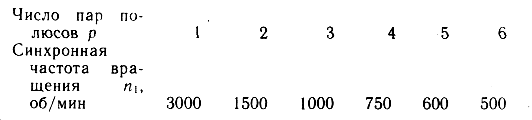
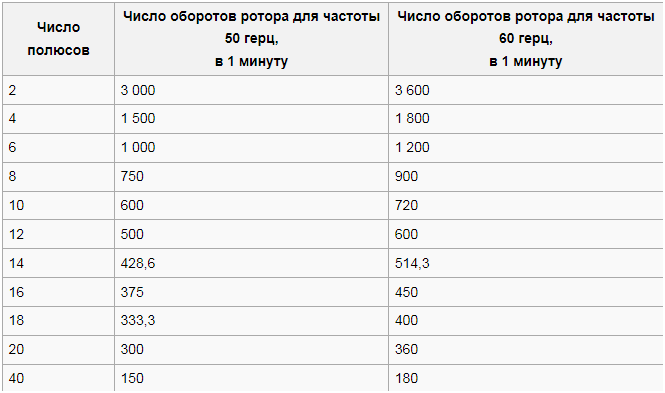
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
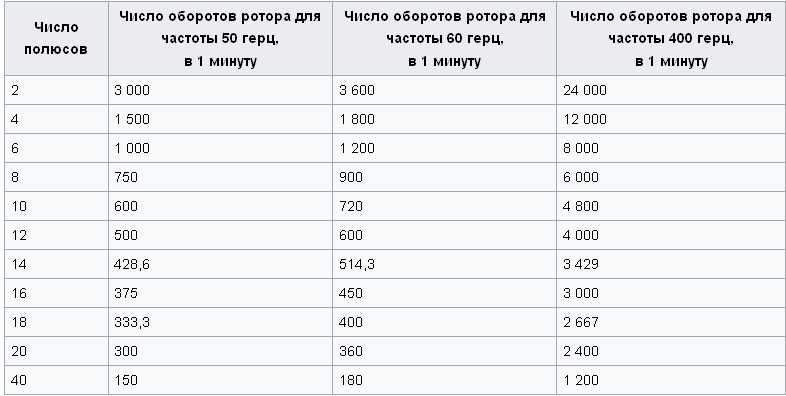
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов. Синхронная частота вращения для различного количества полюсов
| Числополюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Как проверить двигатель перед запуском
Перед тем, как запустить асинхронный двигатель в работу, желательно его проверить на работоспособность. С чего же начать?
Внешний осмотр двигателя. Проверьте, нет ли сколов, вмятин, покрутите вал двигателя. Он должен крутиться плавно и без рывков в обе стороны. Этим действием вы проверяете подшипники, на которых держится ротор двигателя. Если вал двигателя подклинивает, то на это могут быть несколько причин: разбиты посадочные места под подшипники, убитые подшипники, либо ротор затирает статор. Для того, чтобы выяснить причину, нужно будет полностью разобрать двигатель и выяснить реальную проблему. Если все ок, то двигаемся к следующему шагу.
Проверяем обмотки двигателя. Для этого берем мультиметр, ставим его на измерение сопротивления и проверяем сопротивление обмоток. Если обмотки подключены по схеме “звезда”, то нам будет достаточно замерять сопротивление между клеммами, куда подается напряжение питания. Делается это в три этапа.
Раз.
Два.
Три.
Во всех трех случаях сопротивление должно быть одинаково. Допускается отклонение в несколько Ом.
Этими тремя действиями мы проверили обмотки нашего двигателя и убедились, что они все целые.
И заключительный шаг. Проверяем, не звонятся ли обмотки на землю. Так как все обмотки так или иначе соединяются между собой, достаточно будет встать щупом мультиметра на любую из обмоток, а вторым щупом встать на корпус двигателя. Переключатель на мультиметре поставить на измерение МОм.
В идеале должно получиться бесконечно большое сопротивление, в реале от 100 МОм и выше. Если сопротивление очень маленькое, что то около 1-10 Ом, то это означает, что какая-то из обмоток двигателя звонится на землю, что категорически недопустимо. На практике если же сопротивление меньше 1 МОм, то надо выяснить причину и устранить ее. Скорее всего в двигатель попала влага, грязь, либо произошел пробой диэлектрика медного провода. В этом случае поможет только полная разборка и визуальное выяснение причины.
Все те же самые операции применяются и к двигателю со схемой подключения “треугольник”.
Большинство материала для статьи” асинхронный двигатель” было взято из видео ниже. Обязательно к просмотру.
5.4. МАГНИТНЫЕ ПОЛЯ И ЭДС АСИНХРОННОГО ДВИГАТЕЛЯ
При подключении обмотки
статора к сети возникают токи I1, создающие вращающийся магнитный
поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора.
Это будет основной поток обмотки статора. Некоторая часть магнитного потока
рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он
cцепляется только с витками собственной обмотки.
Основной магнитный поток
асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора
со скоростью n1 и обмотку ротора со скоростью n2, наводя
в них основные ЭДС:
;
где W1k1 и W2k2 — произведения чисел витков на обмоточные коэффициенты;
Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2,
которые, как в трансформаторе, могут быть выражены через соответствующие токи
I1 и I2 и индуктивные сопротивления х1 и х2s.
;
где х1 и х2s
— индуктивные сопротивления рассеяния обмоток статора и ротора.
Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые
компенсируются соответствующими ЭДС Er1 и Еr2.
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации. Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу
И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.