Ссылки [ править ]
- ^ Ghaseminejad Liasi, Sahand (15 мая 2015). : 1–50. DOI : . Проверено 24 декабря 2017 года .
- Inc, Образовательный фонд ядерной науки (1 сентября 1973 г.). . Образовательный фонд ядерной науки, Inc. — через Google Книги.
- . Kcl.ac.uk. Архивировано из 21 октября 2009 года . Проверено 1 марта 2010 .
- . Архивировано из на 2011-09-28 . Проверено 24 августа 2011 .
- Патент номер 3585423, 1971 Laithwaite et al.
- [ постоянная неработающая ссылка ]
- ^ linear Электрические машины — личное мнение ЭРИК Р. ЛЕЙТВЭЙТ, ФЛЛОУ, IEEE, ПРОЦЕСС IEEE, VOL. 63, НЕТ. 2 ФЕВРАЛЯ 1975 г.
- ^ . sunilsaharan.in .
- ^ Анализ силы линейного асинхронного двигателя для системы магнитной левитации 14-я Международная конференция по силовой электронике и управлению движением, EPE-PEMC 2010
- Журнал современного транспорта, июнь 2012 г., том 20, выпуск 2, стр. 76–81. Новый метод расчета тяги линейного асинхронного двигателя на основе мгновенного значения тока.
- Фланкл, Майкл; Туйсуз, Арда; де Оливейра Бауманн, Лукас; Колар, Иоганн В. (2019). . IEEE Transactions по промышленной электронике . 66 (6): 4880–4890. DOI . S2CID . Проверено 4 апреля 2018 года .
- . BBC News . 9 ноября 1999 г.
- Маглев, фильм для The People Mover Group
- Maglev блок для Railworld Rail выпуска 425 26 декабря 2001 стр 65
- Мехатронная конструкция индукционного привода z-φ, П. де Вит, Дж. Ван Дейк, Т. Бломер и П. Рутгерс, proc. конференции IEE EMD ’97. Cambridge 1997. pp. 279-283, 1-3 сентября 1997 г.
- Майли, Джессика (2017-06-26). . Интересная инженерия .
| vтеЭлектрические машины | |
|---|---|
|
|
| Компоненты и аксессуары |
|
| Генераторы |
|
| Двигатели |
|
| Контроллеры двигателей |
|
| История, образование, рекреационное использование |
|
| Экспериментальный, футуристический |
|
| похожие темы |
|
| Люди |
|
| vтеМаглев | |
|---|---|
| Технологии |
|
| Системы |
|
| Линии |
|
| Транспортные аварии | |
| Предложения курсивом |
Магнитный двигатель своими руками: как сделать
Практически все в нашей жизни зависит от электричества, но существуют определенные технологии, которые позволяют избавиться от локальной проводной энергии. Предлагаем рассмотреть, как сделать магнитный двигатель своими руками, его принцип работы, схема и устройство.
Типы и принципы работы
Существует понятие вечных двигателей первого порядка и второго.
Первый порядок – это устройства, которые производят энергию сами по себе, из воздуха, второй тип – это двигатели, которым необходимо получать энергию, это может быть ветер, солнечные лучи, вода и т.д., и уже её они преобразовывают в электричество.
Согласно первому началу термодинамики, обе эти теории невозможны, но с таким утверждением не согласны многие ученые, которые и начали разработку вечных двигателей второго порядка, работающих на энергии магнитного поля.
Фото – Магнитный двигатель дудышева
Над разработкой «вечного двигателя» трудилось огромное количество ученых во все времена, наиболее большой вклад в развитие теории о магнитном двигателе сделали Никола Тесла, Николай Лазарев, Василий Шкондин, также хорошо известны варианты Лоренца, Говарда Джонсона, Минато и Перендева.
Фото – Магнитный двигатель Лоренца
У каждого из них своя технология, но все они основаны на магнитном поле, которое образовывается вокруг источника. Стоит о двигателей не существует в принципе, т.к. магниты теряют свои способности приблизительно через 300-400 лет.
Самым простым считается самодельный антигравитационный магнитный двигатель Лоренца. Он работает за счет двух разнозаряженных дисков, которые подключаются к источнику питания. Диски наполовину помещаются в полусферический магнитный экран, поле чего их начинают аккуратно вращать. Такой сверхпроводник очень легко выталкивает из себя МП.
Простейший асинхронный электромагнитный двигатель Тесла основан на принципе вращающегося магнитного поля, и способен производить электричество из его энергии. Изолированная металлическая пластина помещается как можно выше над уровнем земли.
Другая металлическая пластина помещается в землю. Провод пропускается через металлическую пластину, с одной стороны конденсатора и следующий проводник идет от основания пластины к другой стороне конденсатора.
Противоположный полюс конденсатора, будучи подключенным к массе, используется как резервуар для хранения отрицательных зарядов энергии.
Фото – Магнитный двигатель Тесла
Роторный кольцар Лазарева пока что считается единственным работающим ВД2, кроме того, он прост в воспроизведении, его можно собрать своими руками в домашних условиях, имея в пользовании подручные средства. На фото показана схема простого кольцевого двигателя Лазарева:
Фото – Кольцар Лазарева
На схеме видно, что емкость поделена на две части специальной пористой перегородкой, сам Лазарев применял для этого керамический диск. В этот диск установлена трубка, а емкость заполнена жидкостью. Вы для эксперимента можете налить даже простую воду, но желательно применять улетучивающийся раствор, к примеру, бензин.
Работа осуществляется следующим образом: при помощи перегородки, раствор попадает в нижнюю часть емкости, а из-за давления по трубке перемещается наверх. Это пока что только вечное движение, не зависящее от внешних факторов. Для того чтобы соорудить вечный двигатель, нужно под капающей жидкостью расположить колесико.
На основе этой технологии и был создан самый простой самовращающийся магнитный электродвигатель постоянного движения, патент зарегистрирован на одну российскую компанию. Нужно под капельницу установить колесико с лопастями, а непосредственно на них разместить магниты.
Из-за образовавшегося магнитного поля, колесо начнет вращаться быстрее, быстрее перекачиваться вода и образуется постоянное магнитное поле.
5.3. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Вращающееся магнитное поле
статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная
обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника,
взаимодействуя с полем статора, создает электромагнитную силу — Fэм.
Совокупность сил всех проводников обмотки создает электромагнитный момент М,
который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора
n2 будет всегда меньше синхронной частоты n1, т.е. ротор
всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается
с частотой n2 равной частоте вращающегося поля статора n1.
В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно,
в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий
момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может
вращаться синхронно c полем статора. Разность между частотами поля статора n2
и ротора n1 называется частотой скольжения Dn.
.
Отношение частоты скольжения к частоте поля называется скольжением:
.*)
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы.
Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Преобразуя
выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного
двигателя электрически не связана с обмоткой статора. В этом отношении двигатель
подобен трансформатору, в котором обмотка статора является первичной обмоткой,
а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора
наводится неизменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя
— потоком постоянным по величине, но вращающимся в пространстве. Эффект в том
и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора,
неподвижной, обмотка ротора двигателя вместе с ним вращается.
ЭДС роторной обмотки, в
свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться,
анализируя процессы, протекающие в асинхронном двигателе.
Синхронная частота вращения
магнитного поля статора перемещается относительно ротора с частотой скольжения
Dn. Она же наводит в обмотке
ротора ЭДС E2, частота которой f2 связана со скольжением
S:
Учитывая, что f1=рn1/60,
f2=рn1S/60.
Приняв величину номинального скольжения порядка 0,01-0,1,
можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет
0,5-5 Гц (при f1=50 Гц).
Пусковой ток
Прямой пуск мотора характеризуется значительно большим уровнем тока, чем при его стабильной работе. Пусковой показатель может превышать номинал в 5-8 раз. При этом номинальный ток всегда указывается производителем на шильдике двигателя, тогда как пусковой описан только в технической документации. В характеристиках этот параметр указан как отношение пускового тока к номинальному.
Как вычислить пусковое напряжение?
Есть несколько способов произвести расчет пускового тока для асинхронного двигателя. Эти варианты пригодятся в том случае, если величина соотношения не указана в технической документации или сопровождающие бумаги были утеряны:
- Осциллограф. Проверка показаний производится в момент пуска посредством резисторного шунта. Действующее напряжение вычисляют из максимального амплитудного значения, после чего, используя закон Ома, определяют пусковой ток. Преимущество такого способа в получении конкретных данных по определенному двигателю.
- Пониженное напряжение. В таком варианте на двигатель подается сниженное в 5-10 раз напряжение и производится замер. После пересчета получается пусковой ток. Причем замеры достаточно произвести для 1 фазы. На остальных пусковые показатели должны быть аналогичными. Данный способ применяется на производстве для получения данных, отображаемых в таблице. Основанием служит номинальный ток, поэтому в каждом отдельном случае пусковой показатель может быть другим.
- Токоизмерительные клещи. Простой и быстрый метод. Наиболее точные показания получаются при замере на системах с длительным пуском и высокой инерцией. Например, это могут быть вентиляторы или двигатели с массивной крыльчаткой.
- Трансформатор. Способ, применяемый в узлах учета электроэнергии. Используя трансформатор, не нужно измерять реальный ток, достаточно получить его величину, уменьшенную в определенное количество раз. Существенным минусом метода является то, что трансформатор рассчитан на частотный диапазон в 50-60 Гц, тогда как пусковые переходные процессы могут иметь более широкий спектр и гармоники.
Важно помнить, что, в силу определенных факторов, заявленный производителем пусковой ток будет иметь большую кратность, чем его реальное значение
Как уменьшить напряжение при пуске асинхронного мотора
Большое пусковое усилие часто становится проблемой, вызывая перегрузки питающей сети, перегрев, ускоренный износ двигателя. Поэтому необходимо иметь возможность понизить его величину для сохранения работоспособности и долговечности систем. Есть несколько способов:


- Плавный пуск. В таком варианте на двигатель подается сначала пониженное напряжение с постепенным повышением до номинала. Для реализации метода используются УПП (устройства плавного пуска) или частотные преобразователи.
- Ограничители. В таком исполнении в качестве ограничивающего элемента при пуске применяются резисторы с высокими показателями сопротивления. После срабатывания таймера производится переключение двигателя на номинальное значение. Для сборки такого пускового устройства достаточно использовать контактор и реле времени, поэтому сделать его можно самостоятельно.
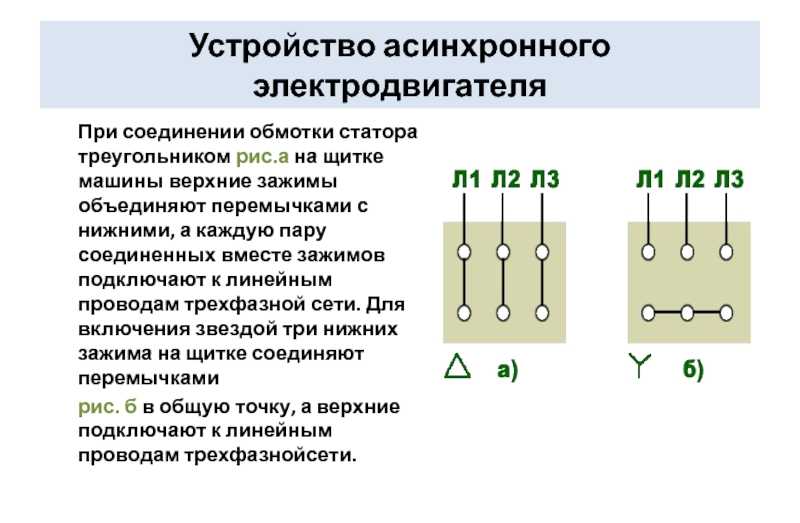
- Звезда-треугольник. Особый способ подключения обмоток, который позволяет сразу использовать полное напряжение на прямой пуск и реверс, однако выводить магнитное поле двигателя на номинальную мощность постепенно. Такой подход помогает сохранить рабочие характеристики агрегата. Чертеж подобного подключения можно найти в интернете.
Есть также варианты запуска и раскручивания асинхронного реверсивного двигателя вхолостую. Нагрузка подключается только после достижения достаточных оборотов. В таком исполнении могут применяться вариаторы, муфты, коробки передач. При необходимости реализовать быструю остановку, можно использовать динамическое торможение, для чего на обмотки статора подается постоянное напряжение.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
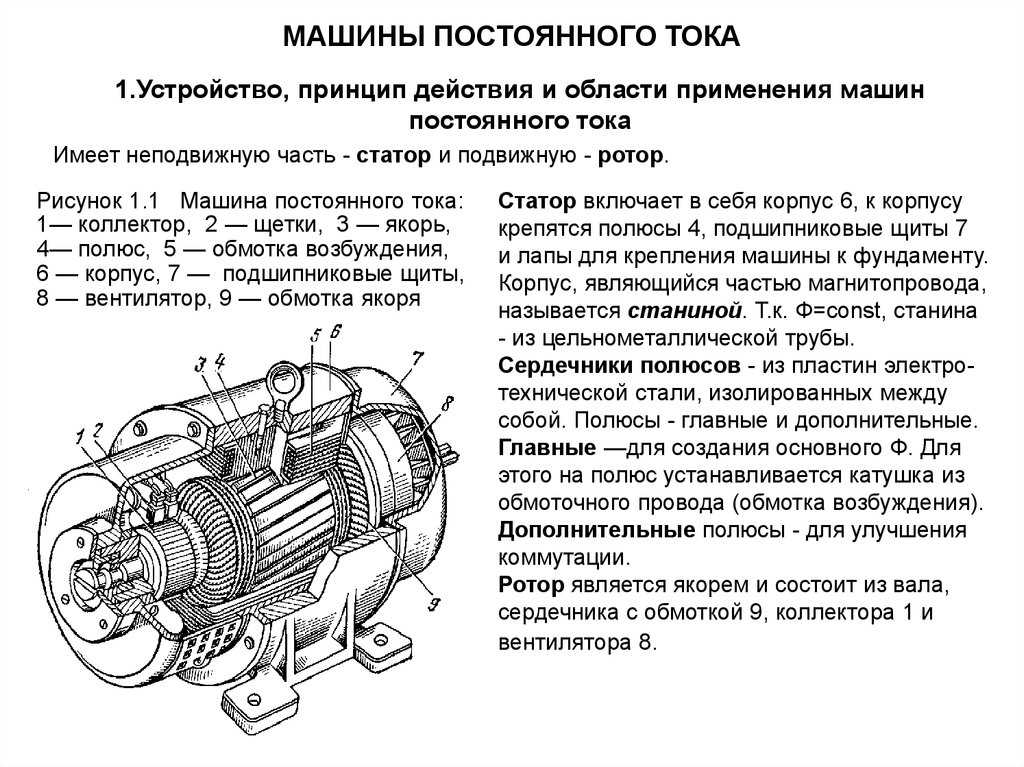
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.



где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
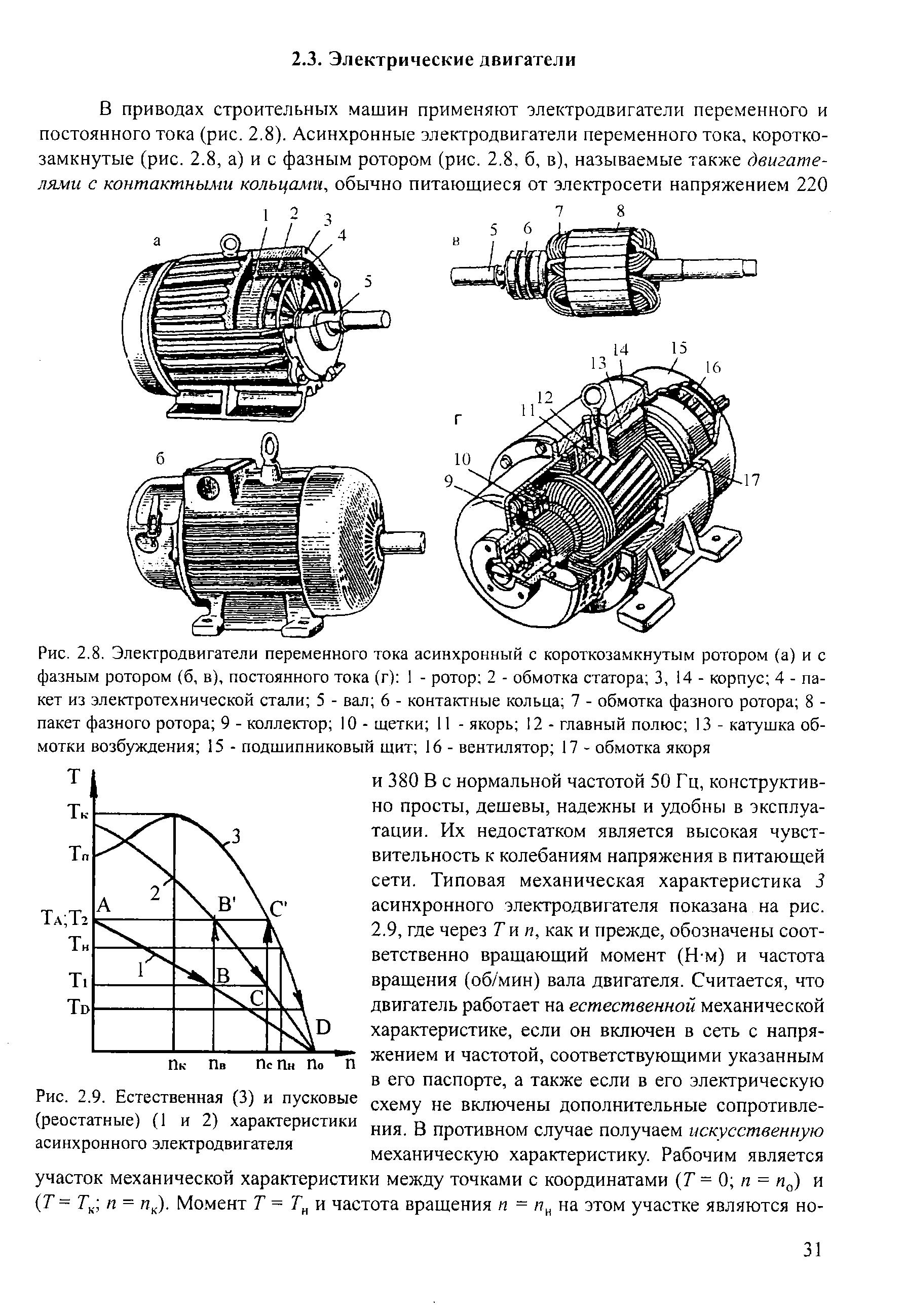
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Асинхронные электроприводы
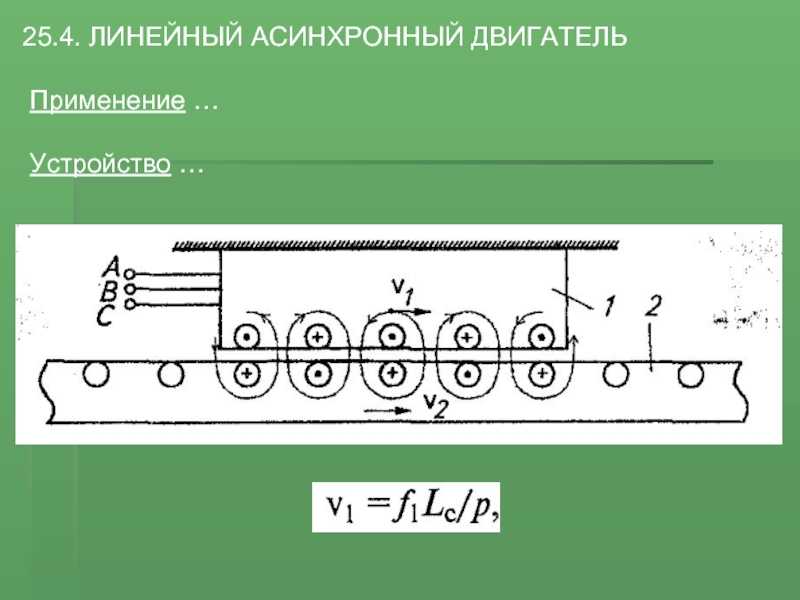
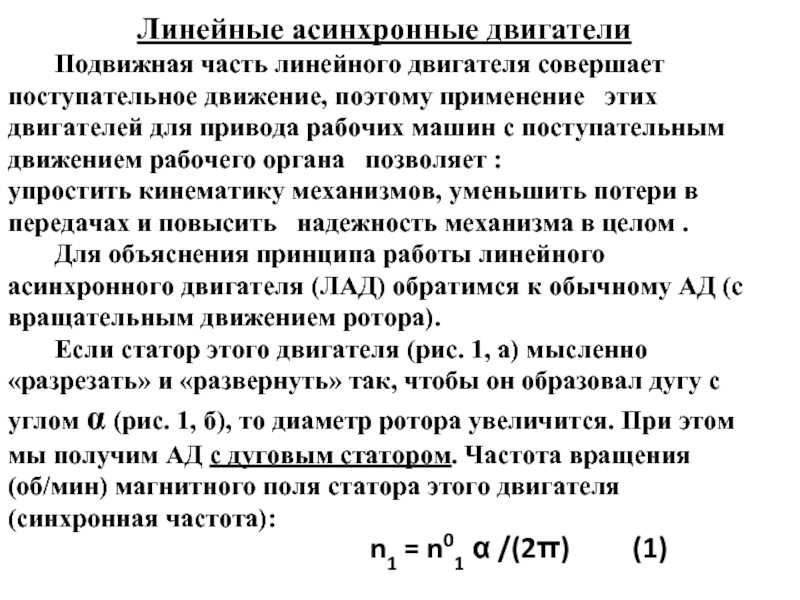
Линейные асинхронные двигатели относятся к наиболее распространенным видам электромоторов с поступательным движением. Работают в соответствии с вышеописанным принципом. Отличаются простой структурой бегуна и в зависимости от его типа подразделяются на следующие группы:
- с короткозамкнутой обмоткой (а);
- со сплошным ферромагнитным омедненным бегуном (б);
- с постоянными магнитами (в).
![]()
Отличительная особенность линейного асинхронного двигателя с постоянными магнитами состоит в практически полном отсутствии сил притяжения бегуна к статору, что важно для некоторых разновидностей электроприводов. Во многих приводных машинах, в том числе в составе станков с ЧПУ, линейный асинхронный двигатель осуществляет возвратно-поступательное движение
Поэтому он должен иметь хорошие пусковые характеристики, что достигается выбором бегуна с повышенным активным сопротивлением.
Существенный недостаток, которым обладают линейные асинхронные двигатели, состоит в наличии краевого эффекта. Данное явление представляет собой комплекс электромагнитных процессов ухудшающих рабочие характеристики ЛД. Это обусловлено разомкнутой конструкцией статора, являющейся причиной появления тормозных усилий, возникновения поперечных сил, стремящихся сместить подвижную часть в поперечном направлении.
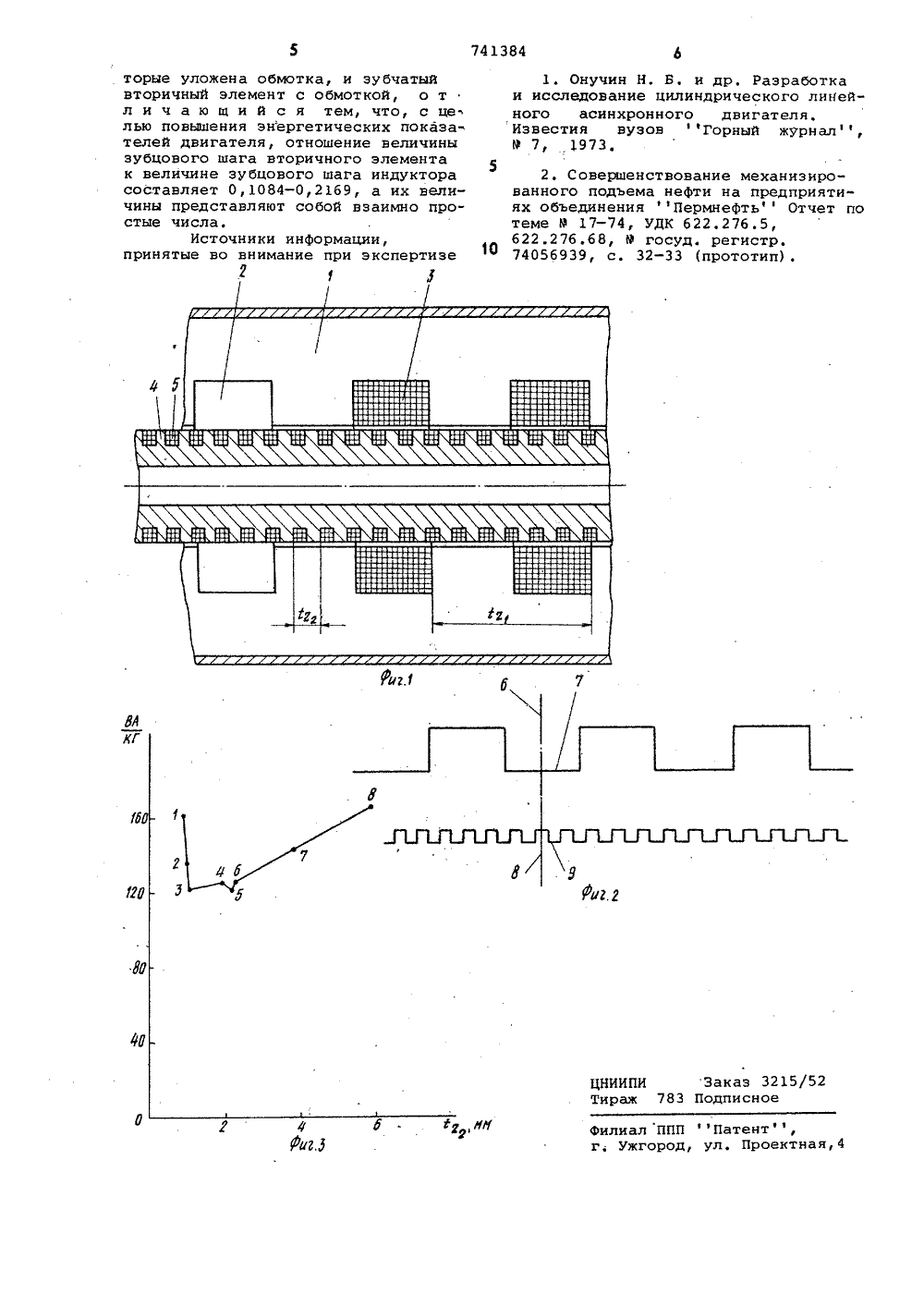
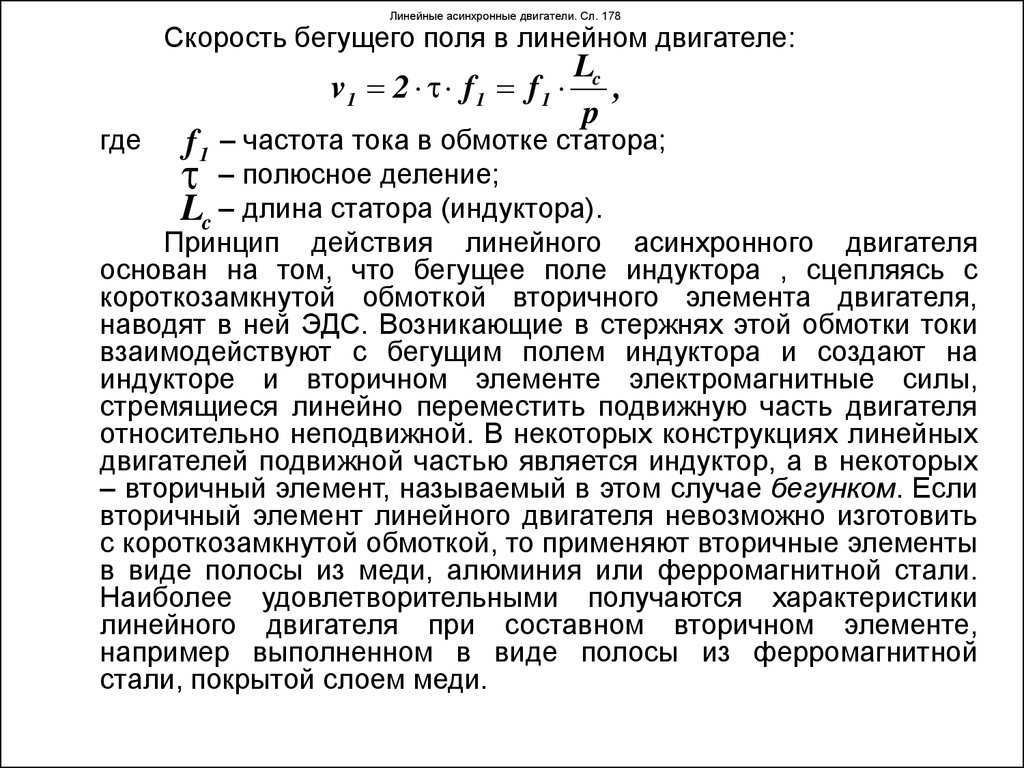
Одной из разновидностей асинхронных ЛД является трубчатый линейный двигатель, называемый также коаксиальным или цилиндрическим. Принципиальное отличие эл/привода состоит в круговом расположении обмоток (на рисунке поз.2) относительно постоянных магнитов. При этом магнитные элементы сформированы в виде цилиндра (поз.1). Упрощенно схема линейного двигателя представляет собой трубчатый объем, на который необходимо намотать электрический проводник. Выглядит это следующим образом:
![]()
Цилиндрический линейный двигатель не имеет сердечника, являющегося источником излишнего нагрева под воздействием вихревых токов. В нем также не возникает дополнительных усилий в области между электрообмотками и цилиндром. Это способствует более плавному, равномерному движению при любых величинах скорости. Как результат, КПД линейного двигателя трубчатого типа заметно выше, чем аналогичный показатель у плоского привода.
Ввиду симметричной конструкции цилиндрический линейный двигатель не столь чувствителен к неравномерности размеров зазора, что упрощает его монтаж и изготовление. Благодаря симметрии он также превосходит в эффективности использования магнитного поля и требует вдвое меньшего числа редкоземельных магнитных материалов, чем плоский линейный асинхронный двигатель. Это обеспечивает существенную экономию при изготовлении электродвигателя.
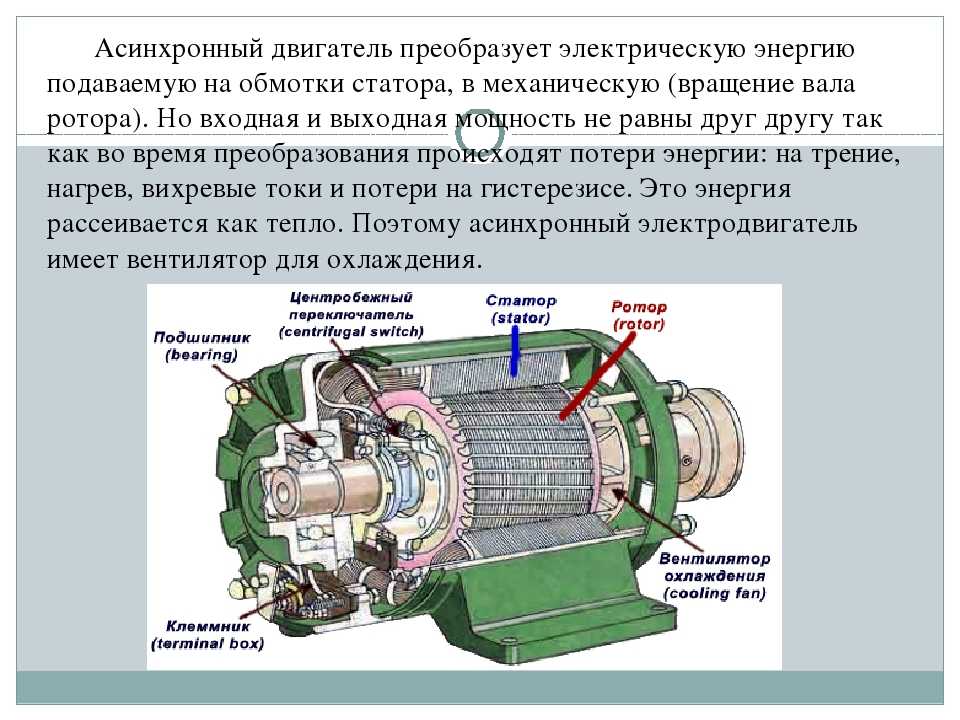
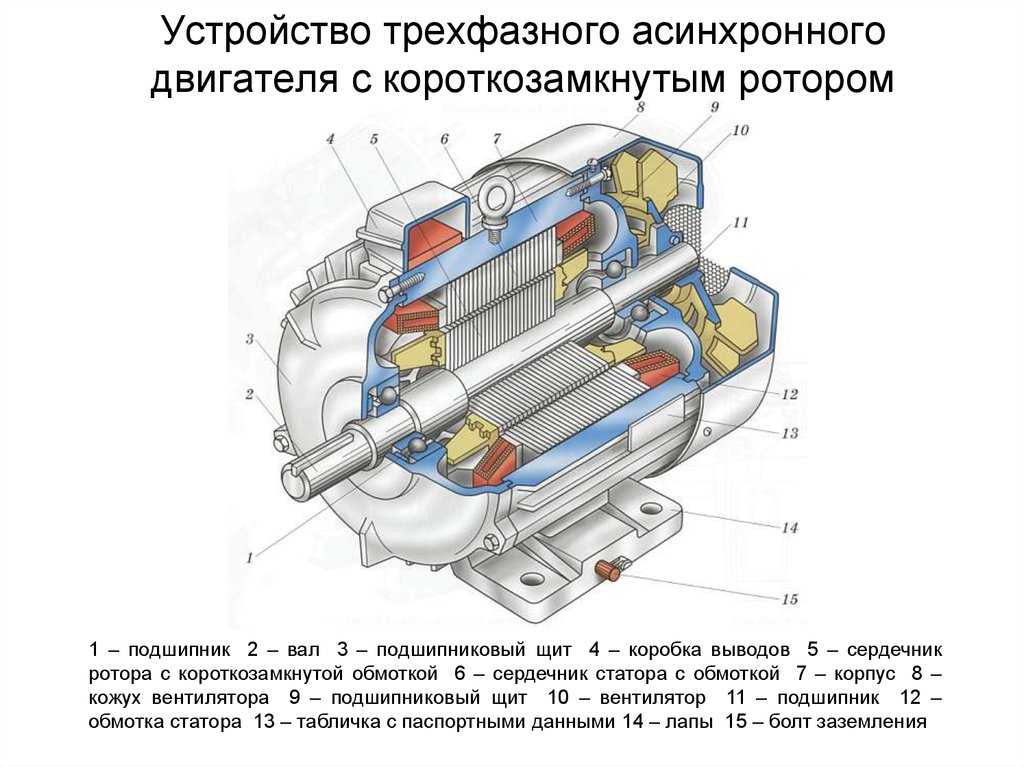
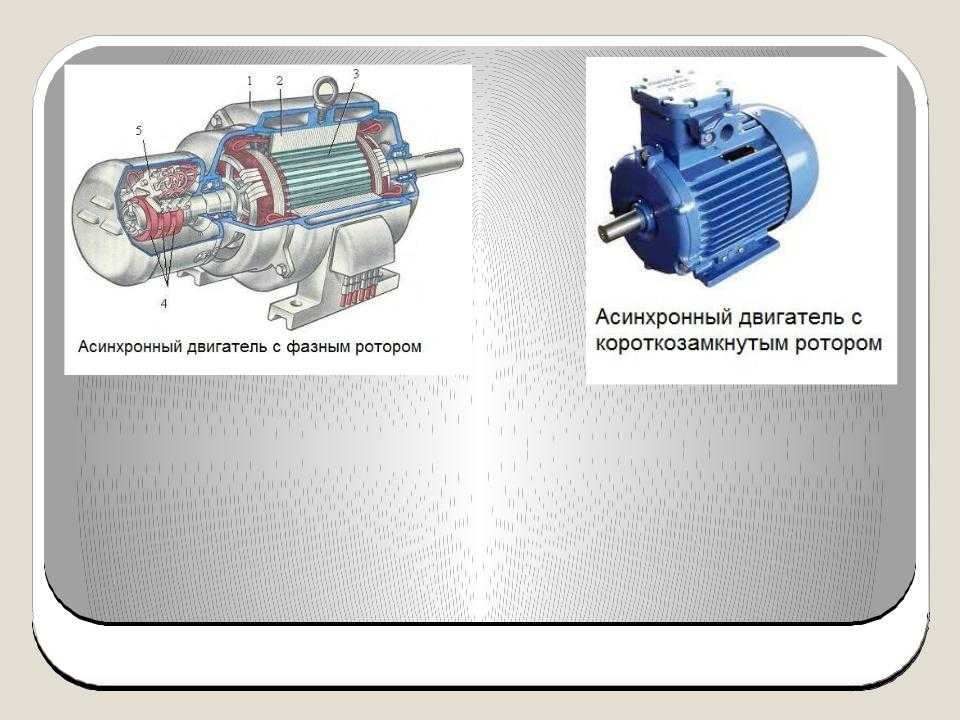
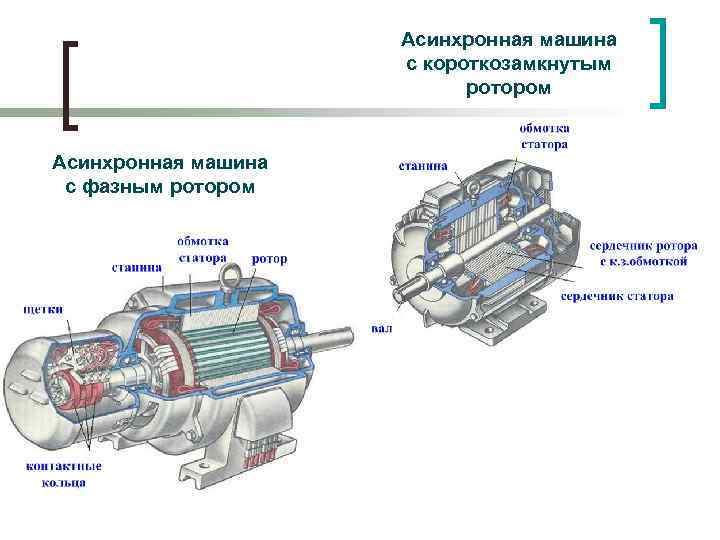
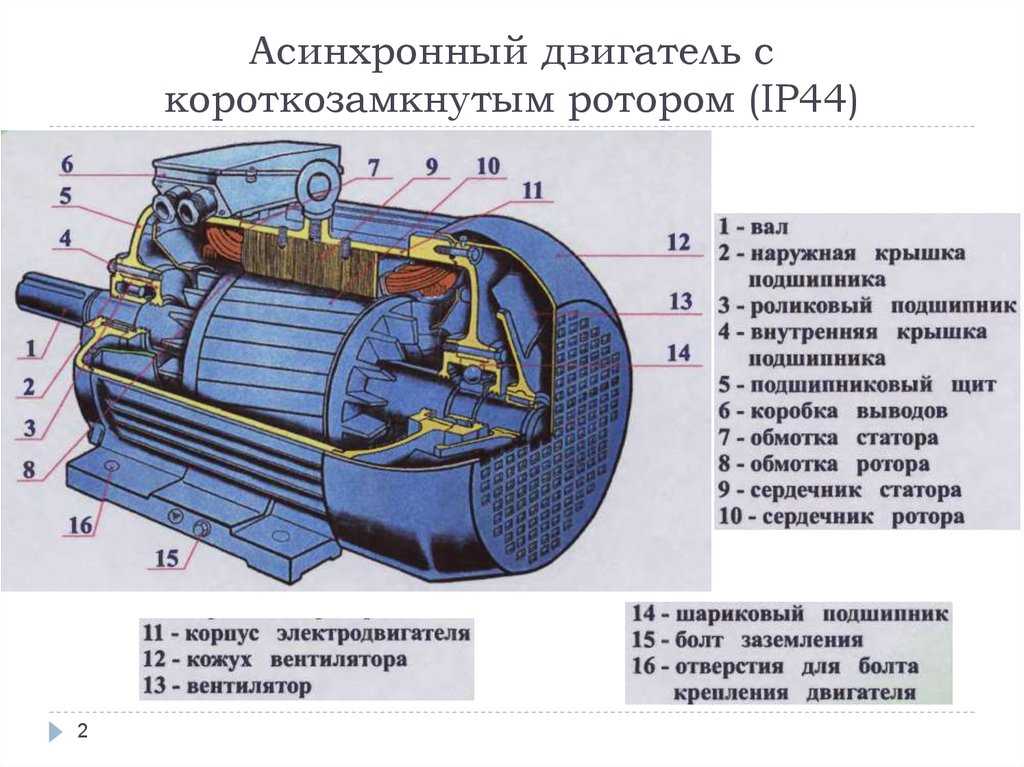
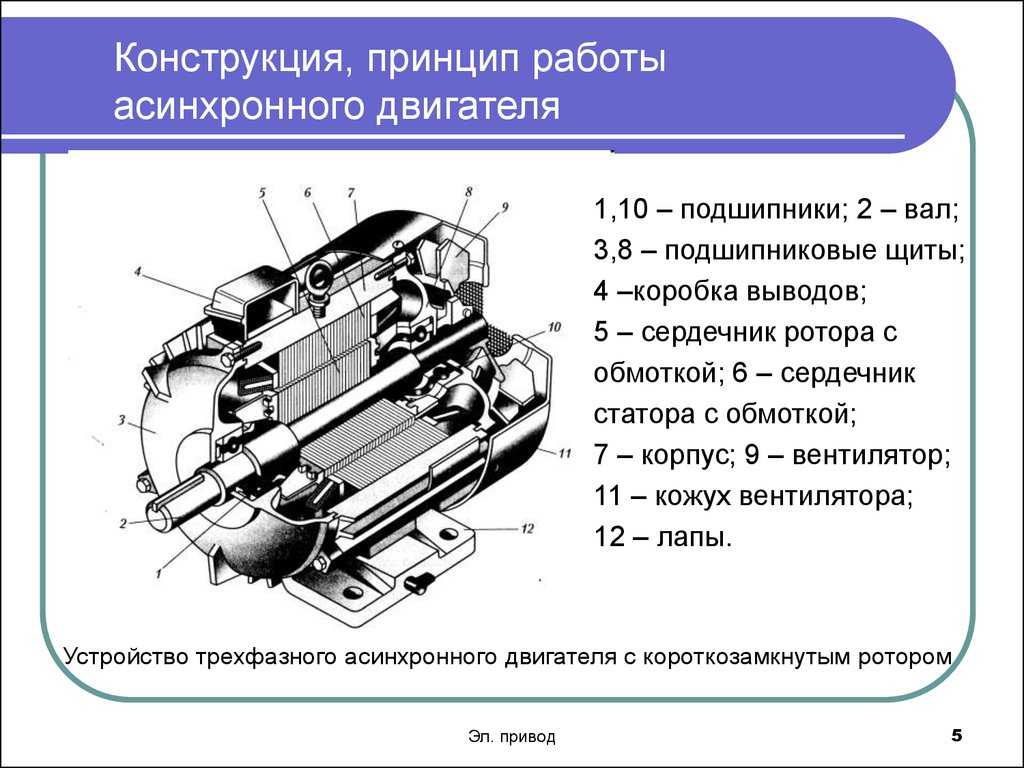
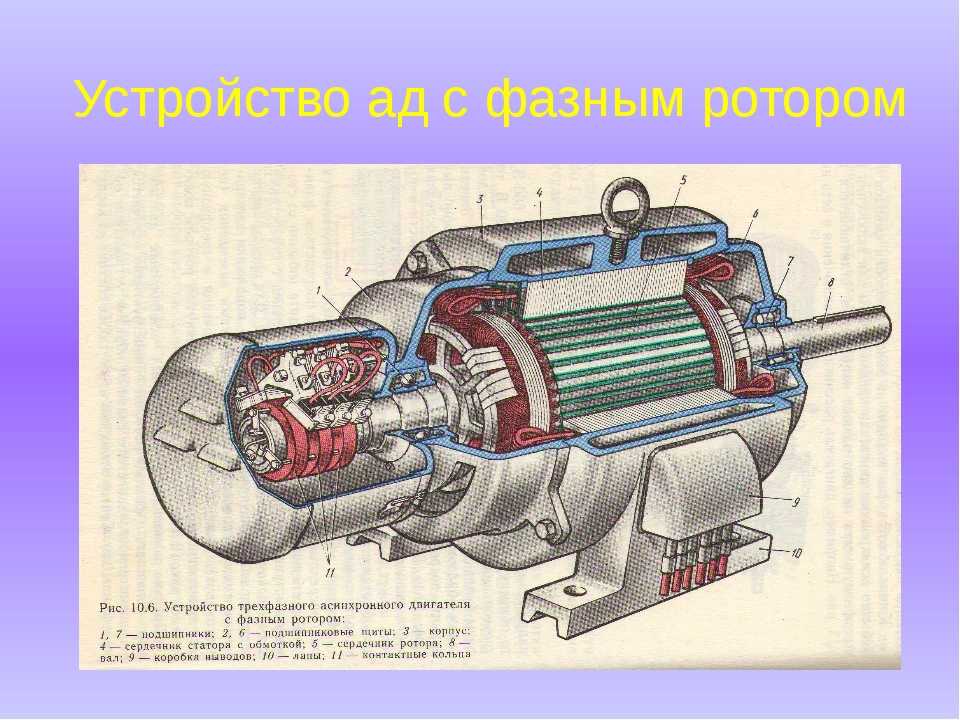
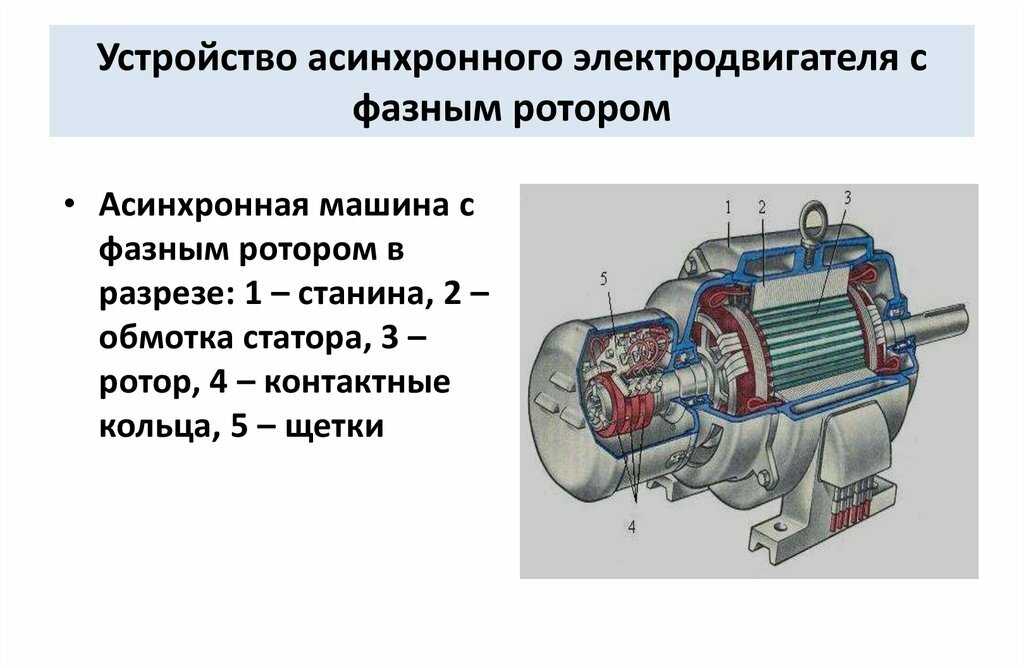
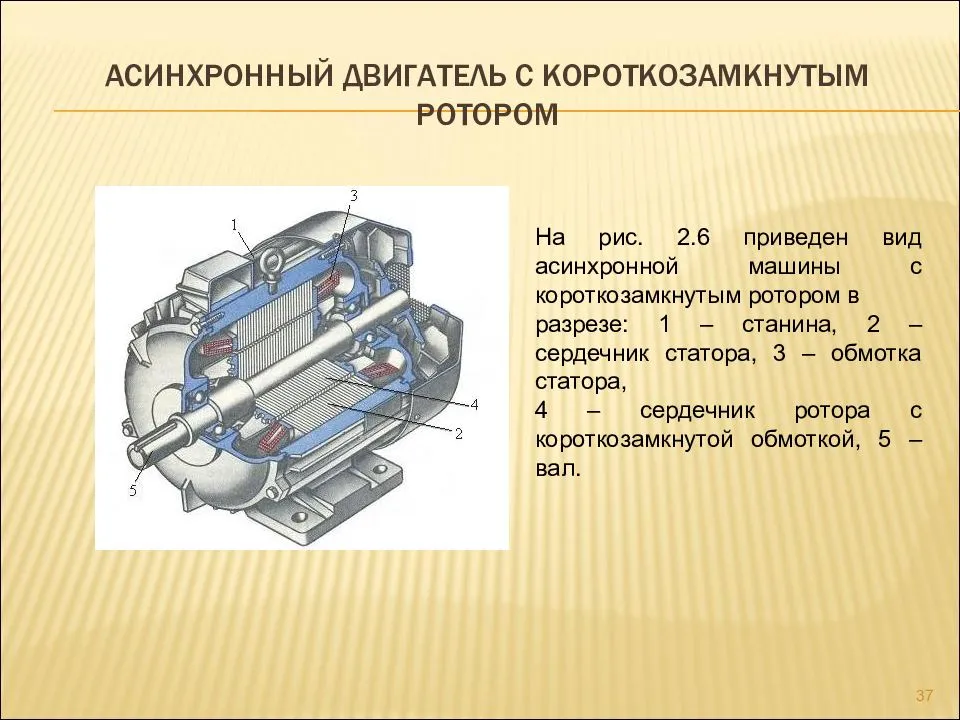
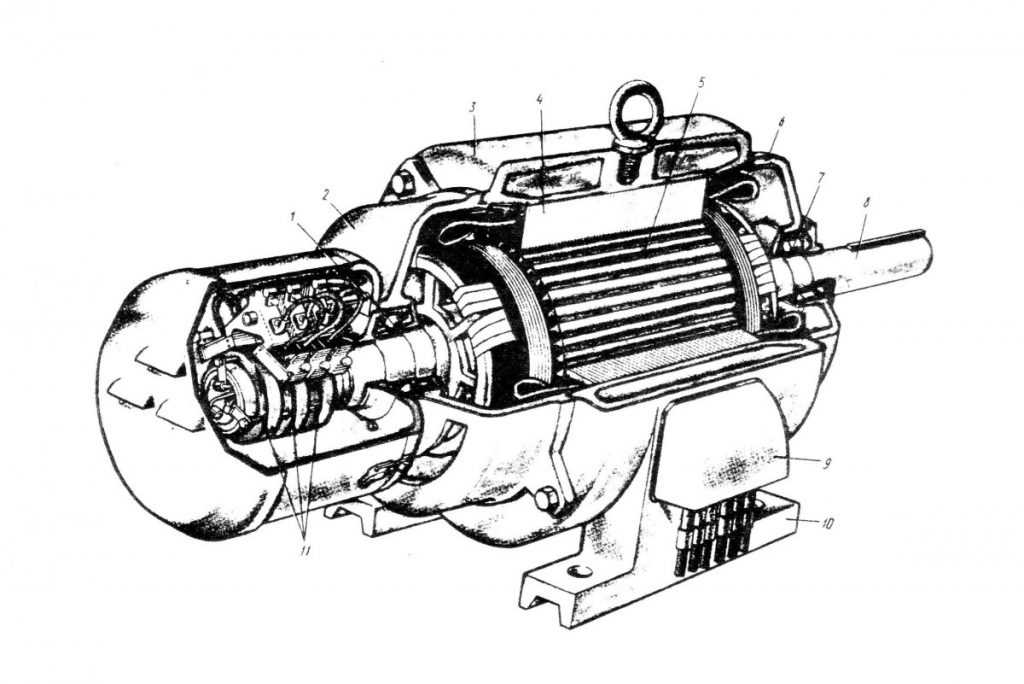
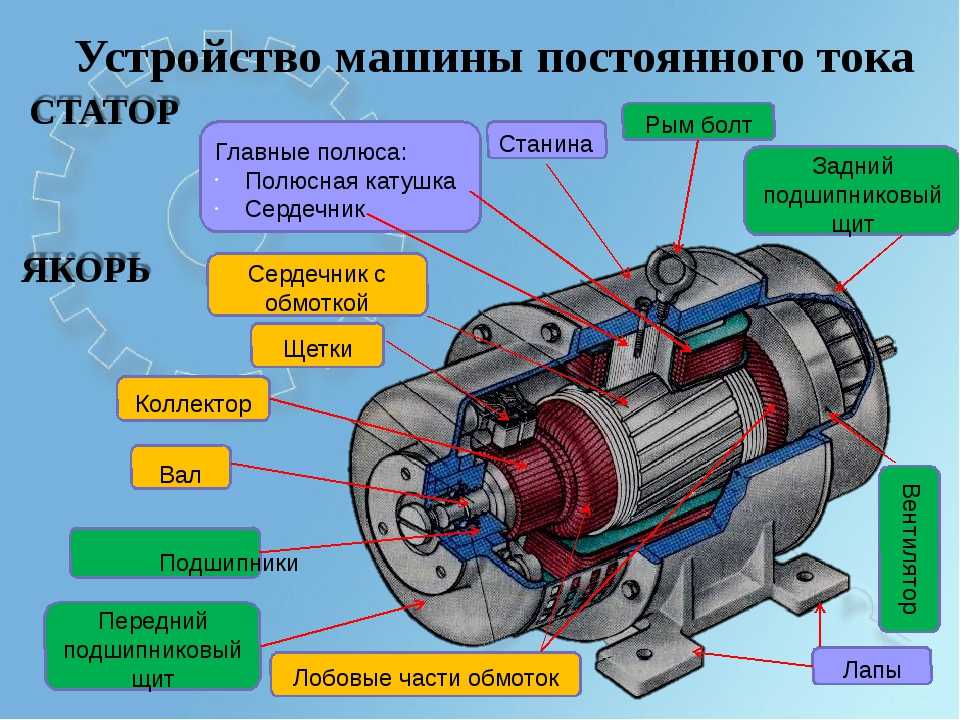
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
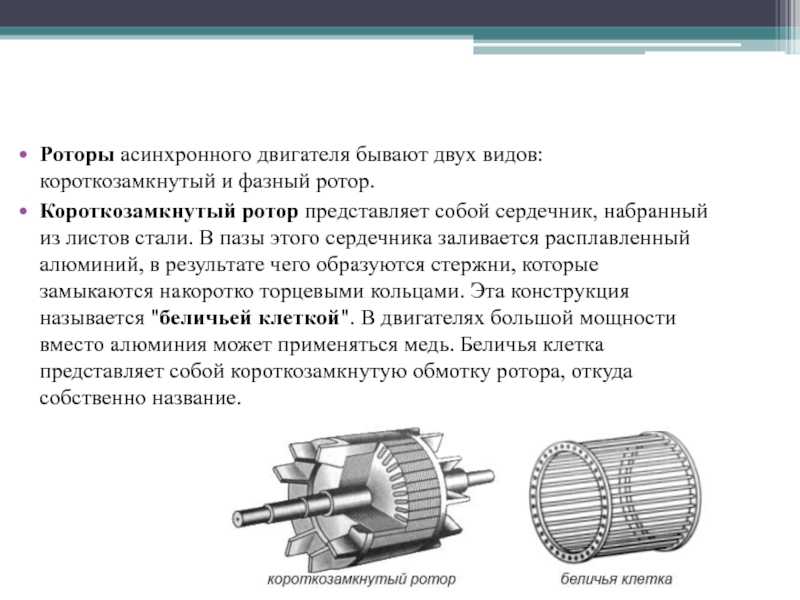
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.


Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.











