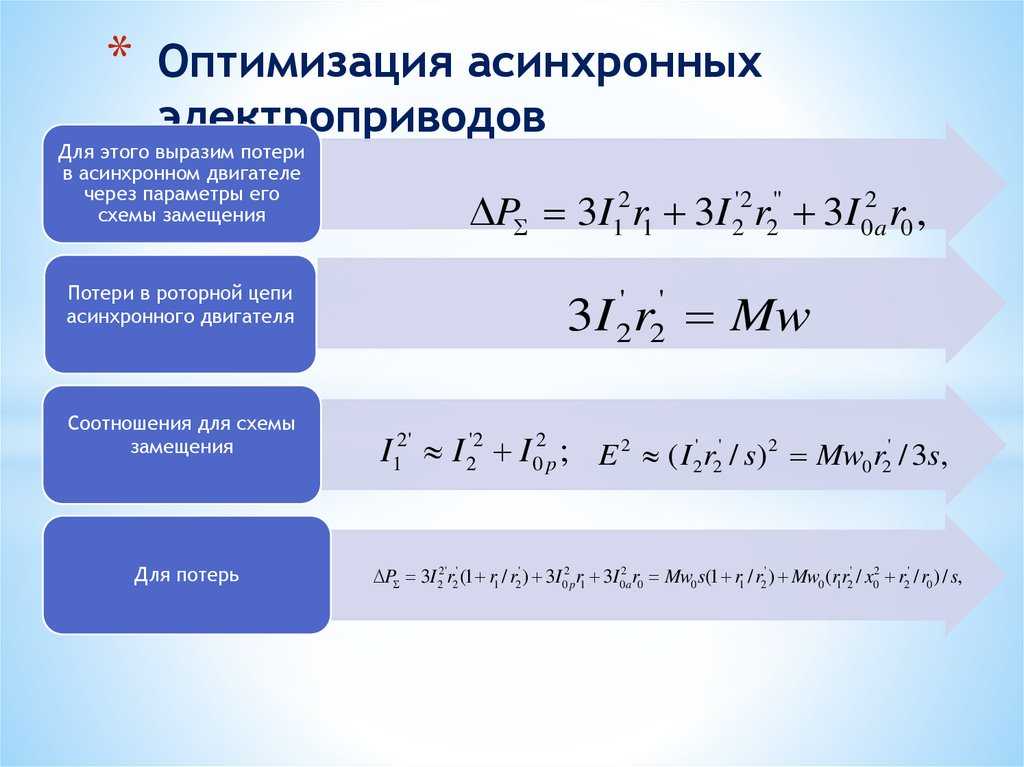
Потери асинхронного двигателя
Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
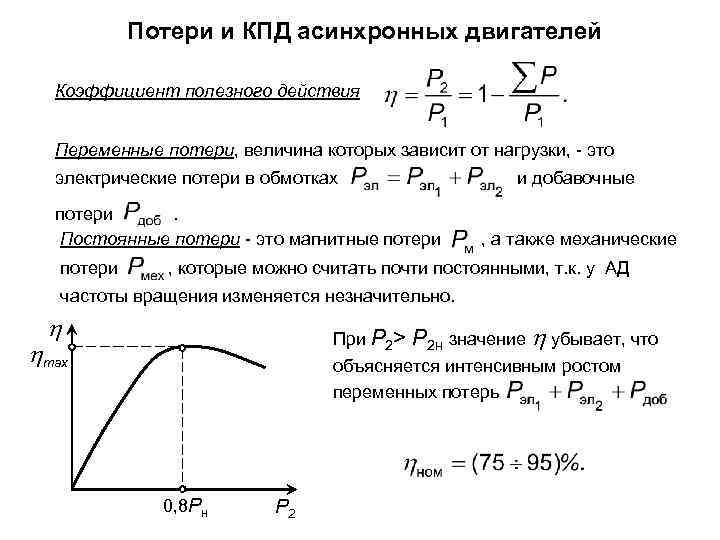
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах
Мощность, подводимая к двигателю
где m – количество фаз, U 1 – напряжение на статорной обмотке, I 1 – ток в статорной обмотке, cosφ 1 – коэффициент мощности двигателя
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P
Потери ∑P складываются из магнитных, электрических и механических потерь
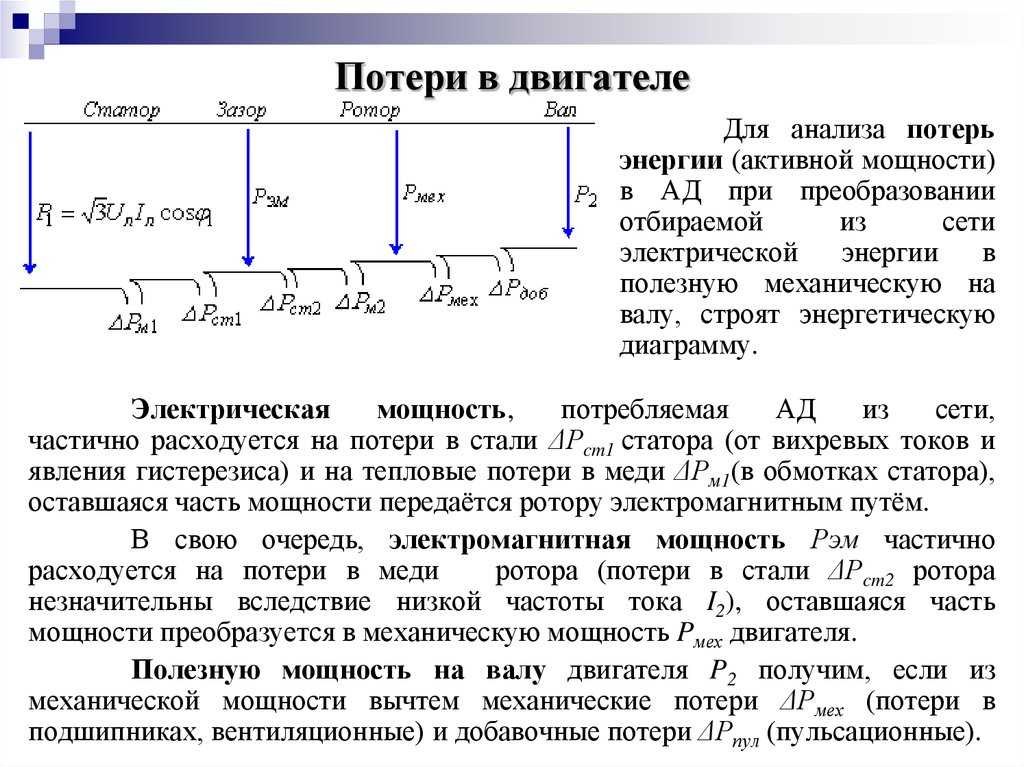
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре
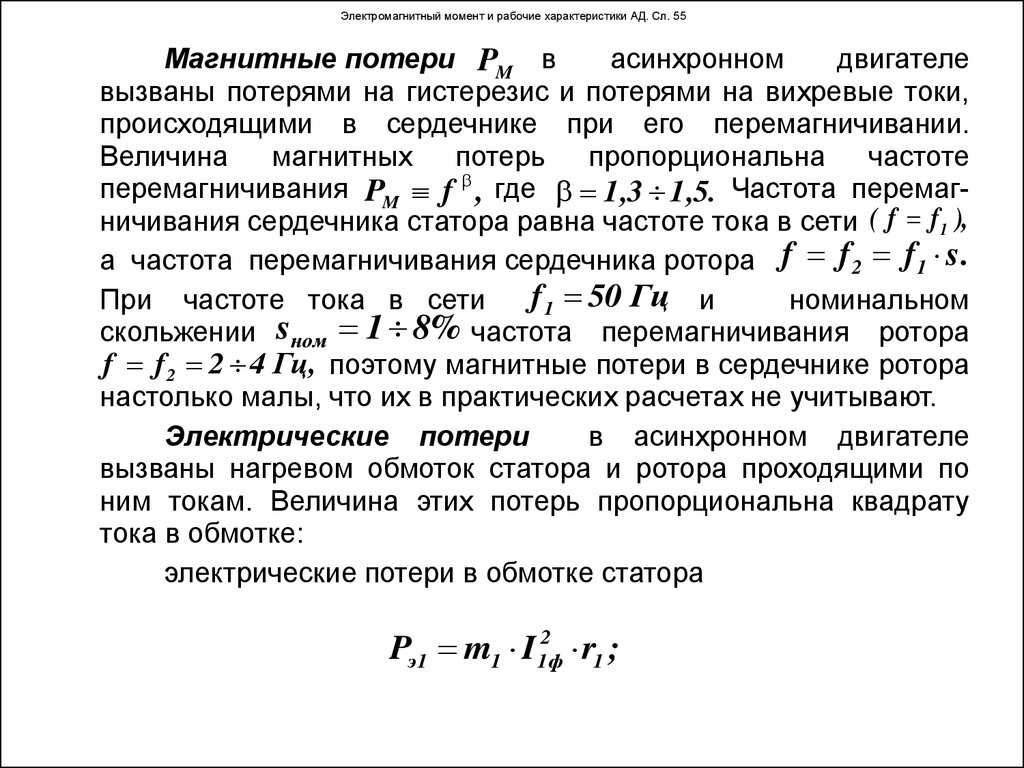
Электрические потери в статоре
где r1 активное сопротивление обмотки статора
Магнитные потери в статоре приблизительно определяются как
где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна
Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению
Отсюда можно получить выражение для скольжения
Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе
где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической
Часть механической мощности расходуется на механические и добавочные потери.
К механическим, относятся потери от трения в подшипниках, щетках и вентиляционные.
К добавочным потерям относят все остальные трудно учитываемые потери, которые, как правило, состоят из пульсационных и поверхностных потерь, которые возникают в зубцах ротора и статора. Приблизительное значение добавочных потерь рассчитывается по формуле
Оставшаяся мощность представляет собой полезную мощность на валу двигателя
5.18.6 Поворотные трансформаторы
Так называют электрические машины переменного тока,
предназначенные для преобразования угла поворота q в напряжение,
пропорциональное некоторым функциям угла поворота ротора sinq
или cosq, а также самому углу q. Их применяют в вычислительной
технике для выполнения различных математических операций. С помощью поворотных
трансформаторов решают геометрические задачи, связанные с построением треугольников,
преобразованием координат, разложением и построением векторов. В системах автоматического
регулирования поворотные трансформаторы используют в качестве измерителей расстояния,
фиксирующих отклонение системы от некоторого определенного положения.
Конструктивно поворотный трансформатор представляет
собой асинхронную машину малой мощности. На статоре ее перпендикулярно размещены
две обмотки: C1-C2 и С3-С4.
Первая получила название главной, а вторая — квадратурной. Обмотки статора выполняются
одинаковыми, т.е. с одинаковым числом витков. На роторе может быть одна обмотка,
но чаще их бывает две. На рис. 5.18.6.1. приведены схемы включения синусного,
косинусного и синусно-косинусного поворотных трансформаторов.
5.17. ИСПОЛЬЗОВАНИЕ ТРЕХФАЗНОГО ДВИГАТЕЛЯ В КАЧЕСТВЕ ОДНОФАЗНОГО
Очень часто задают вопрос, нельзя ли обычный трехфазный
двигатель включить в однофазную сеть переменного тока?
Рассуждения в п.5.14., относящиеся к однофазным двигателям,
можно отнести к двигателям с трехфазной обмоткой на статоре. На рис. 5.17.1.
показаны четыре различные схемы подключения двигателей.
Здесь две статорные обмотки включаются в сеть последовательно,
образуя обмотку возбуждения. Третья фазная обмотка является пусковой, поэтому
она содержит фазосдвигающий элемент.
Второе обязательное условие для двухфазных двигателей
здесь можно выполнить достаточно точно путем правильного подбора конденсатора С.
Первое условие здесь выполнено неточно, т.к. пространственный
сдвиг между обмотками составляет не 90°, а 120°.
Вследствие этого, двигатель теряет примерно 50-60% своей номинальной мощности.
5.3. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Вращающееся магнитное поле
статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная
обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника,
взаимодействуя с полем статора, создает электромагнитную силу — Fэм.
Совокупность сил всех проводников обмотки создает электромагнитный момент М,
который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора
n2 будет всегда меньше синхронной частоты n1, т.е. ротор
всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается
с частотой n2 равной частоте вращающегося поля статора n1.
В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно,
в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий
момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может
вращаться синхронно c полем статора. Разность между частотами поля статора n2
и ротора n1 называется частотой скольжения Dn.
.
Отношение частоты скольжения к частоте поля называется скольжением:
.*)
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы.
Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Преобразуя
выражение *), получим выражение частоты вращения ротора:
Обмотка ротора асинхронного
двигателя электрически не связана с обмоткой статора. В этом отношении двигатель
подобен трансформатору, в котором обмотка статора является первичной обмоткой,
а обмотка ротора — вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора
наводится неизменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя
— потоком постоянным по величине, но вращающимся в пространстве. Эффект в том
и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора,
неподвижной, обмотка ротора двигателя вместе с ним вращается.
ЭДС роторной обмотки, в
свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться,
анализируя процессы, протекающие в асинхронном двигателе.
Синхронная частота вращения
магнитного поля статора перемещается относительно ротора с частотой скольжения
Dn. Она же наводит в обмотке
ротора ЭДС E2, частота которой f2 связана со скольжением
S:
Учитывая, что f1=рn1/60,
f2=рn1S/60.
Приняв величину номинального скольжения порядка 0,01-0,1,
можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет
0,5-5 Гц (при f1=50 Гц).
5.11. МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
В последнем выражении для M1 единственным переменным параметром является скольжение S. Зависимость
М=f(S) получило название механической характеристики двигателя (рис. 5.11.1).
В момент пуска двигателя, когда n2=0, скольжение S=1, тогда:
Под действием момента Mn ротор придет во вращение. В дальнейшем скольжение будет уменьшаться,
а вращающий момент увеличиваться. При скольжении Sкр он достигает максимального
значения Mmax.. Величина критического скольжения
.
Тогда, подставив его значение в формулу для М, получим:
Дальнейший разгон двигателя
будет сопровождаться уменьшением скольжения и, вместе с тем уменьшением вращающего
момента. Равновесие наступит, когда величине вращающего момента будет противостоять
тормозной момент, вызванный нагрузкой.
При номинальной нагрузке будут номинальный вращающий момент Мн и номинальное скольжение Sн.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя.
.
Обычно она составляет величину от 1,7 до 2,5.
Отношение пускового момента к номинальному называется кратностью пускового момента
.
Эта величина может быть меньше единицы (например, 0,8) и больше ее (до 1,2). При меньшей кратности двигатель
следует включать в работу без нагрузки, и лишь после разгона подается нагрузка.
Двигатель с кратностью Кп.м.>1 можно включать в сеть с полной нагрузкой.
5.13. ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ.
На практике замечено, что
ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой.
В ряде случаев он превышает номинальный ток в 6 — 10 раз.
Такой нагрузки может не
выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска
крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой
ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов
и автотрансформатора.
Принцип ограничения тока
заключается в том, что к статорной обмотке двигателя на период пуска подводится
пониженное напряжение. После разгона его дополнительные устройства от двигателя
отключаются.
Иногда для снижения напряжения,
подаваемого в обмотки статора, изменяют схему переключения обмоток. Например,
асинхронный двигатель нормально работает по схеме «треугольник». Если
на период пуска его обмотки включить «звездой», то на каждую фазу
придется напряжение в раз меньшее.
Двигатели с фазным ротором
пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные
сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении
частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять
плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока
еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько
обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4),
можно обеспечить различные частоты вращения магнитного поля (соответственно:
3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится
специальным переключателем.
Этот способ регулирования
ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое
применение (например, для привода продольно-строгального станка при рабочем
и обратном ходе).
Третий способ регулирования
частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение
скольжения S достигается введением в цепь ротора регулировочных сопротивлений.
Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования
вращения вала двигателя относится так называемое реверсирование, т.е. изменение
направления вращения на обратное. Осуществляется оно путем изменения порядка
чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления
вращения вала двигателя.
Торможение асинхронного двигателя может быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
Иногда применяют электродинамическое
торможение, когда после отключения двигателя от сети переменного тока в его
обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно
сокращает выбег ротора.
Чаще используется торможение
«противовыключением». После отключения двигателя от сети его кратковременно
включают на вращение в обратную сторону. Как только оставшаяся частота вращения
ротора n2 станет равной нулю, двигатель отключается от сети.
Падение КПД и общие потери в электродвигателе
Существует множество негативных факторов, под влиянием которых складывается количество общих потерь в электрических двигателях. Существуют специальные методики, позволяющие заранее их определить. Например, можно определить наличие зазора, через который мощность частично подается из сети к статору, и далее – на ротор.
Потери мощности, возникающие в самом стартере, состоят из нескольких слагаемых. В первую очередь, это потери, связанные с вихревыми токами и частичным перемагничиванием сердечника статора. Стальные элементы оказывают незначительное влияние и практически не принимаются в расчет. Это связано со скоростью вращения статора, которая значительно превышает скорость магнитного потока. В этом случае ротор должен вращаться в строгом соответствии с заявленными техническими характеристиками.
![]()
Значение механической мощности вала ротора ниже, чем электромагнитная мощность. Разница составляет количество потерь, возникающих в обмотке. К механическим потерям относятся трения в подшипниках и щетках, а также действие воздушной преграды на вращающиеся части.
Для асинхронных электродвигателей характерно наличие дополнительных потерь из-за наличия зубцов в статоре и роторе. Кроме того, в отдельных узлах двигателя возможно появление вихревых потоков. Все эти факторы в совокупности снижают КПД примерно на 0,5% от номинальной мощности агрегата.
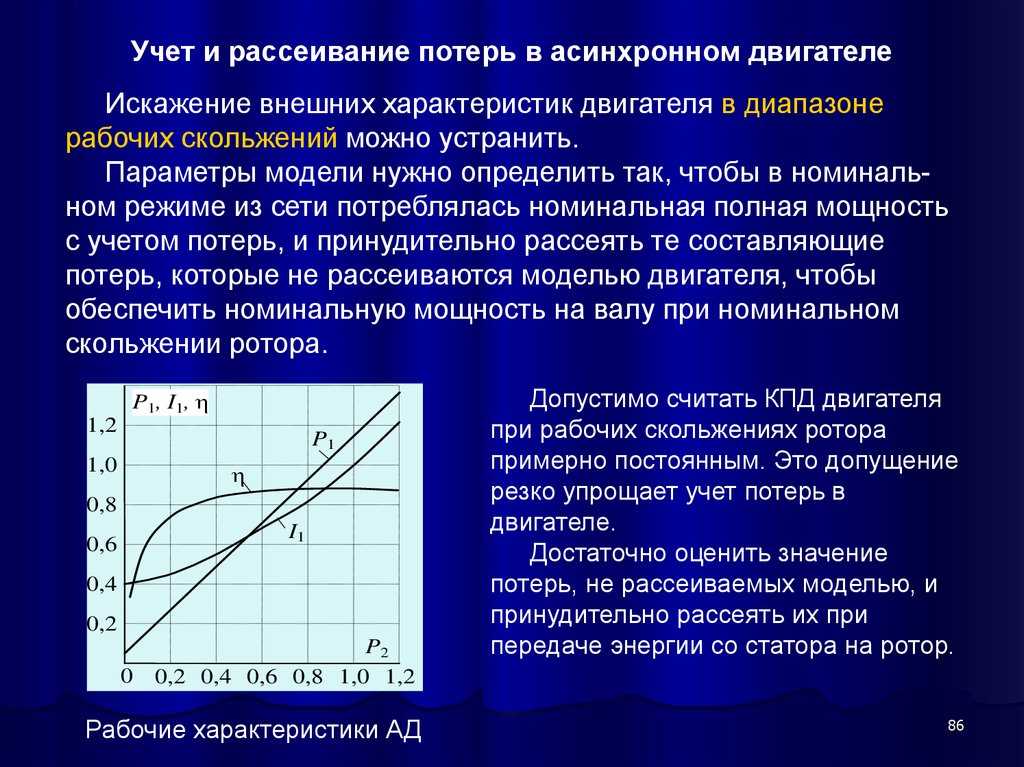
При расчете возможных потерь используется и формула КПД двигателя, позволяющая вычислить уменьшение этого параметра. Прежде всего учитываются суммарные потери мощности, которые напрямую связаны с нагрузкой двигателя. С возрастанием нагрузки, пропорционально увеличиваются потери и снижается коэффициент полезного действия.
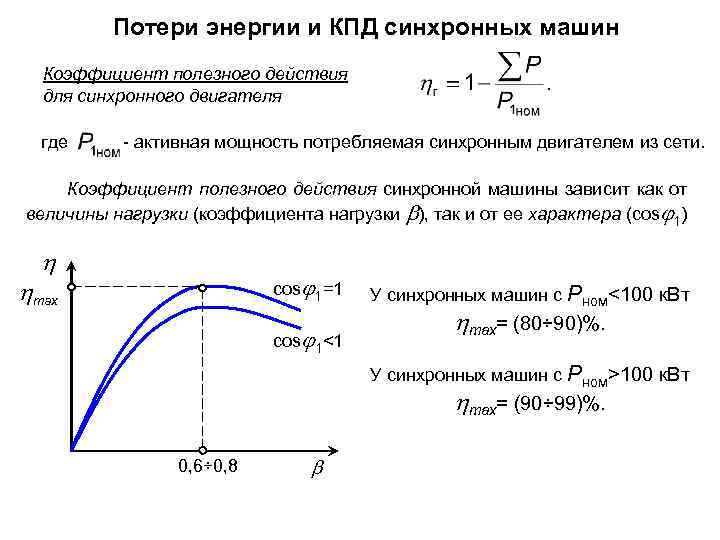
В конструкциях асинхронных электродвигателей учитываются все возможные потери при наличии максимальных нагрузок. Поэтому диапазон КПД этих устройств достаточно широкий и составляет от 80 до 90%. В двигателях повышенной мощности этот показатель может доходить до 90-96%.
https://youtube.com/watch?v=0YP-kCepWHU
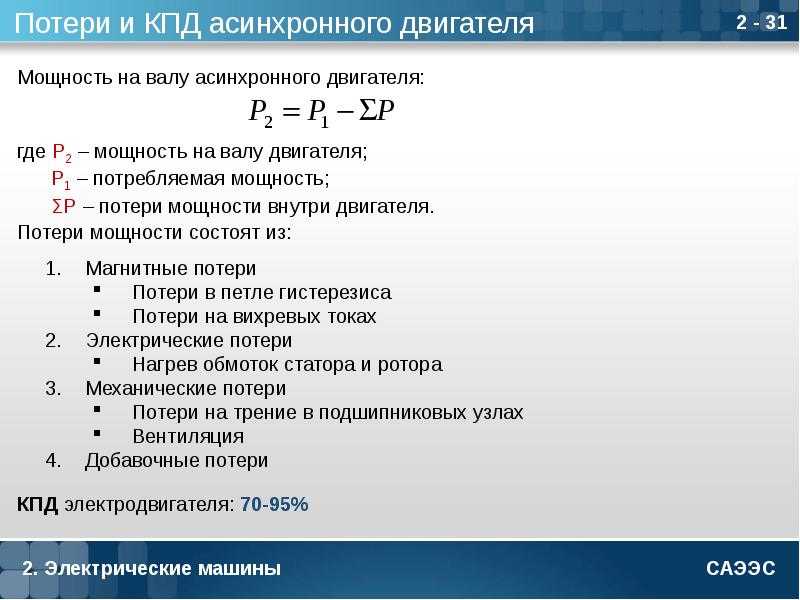
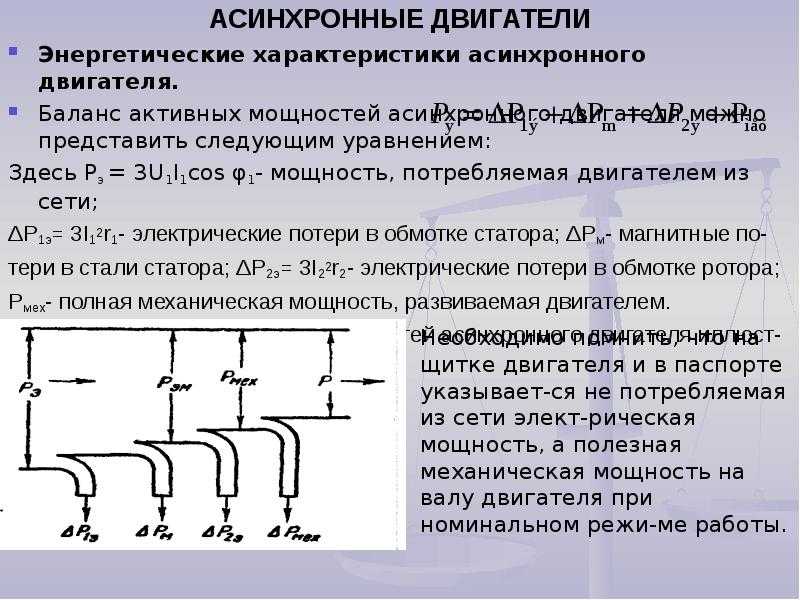
Преобразование электрической энергии в механическую в асинхронном двигателе , как и у других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя P2 всегда меньше мощности на входе (потребляемой) P1 на величину потерь ∑P:
P2 = P1-∑P.
Потери принято делить на основные и добавочные:
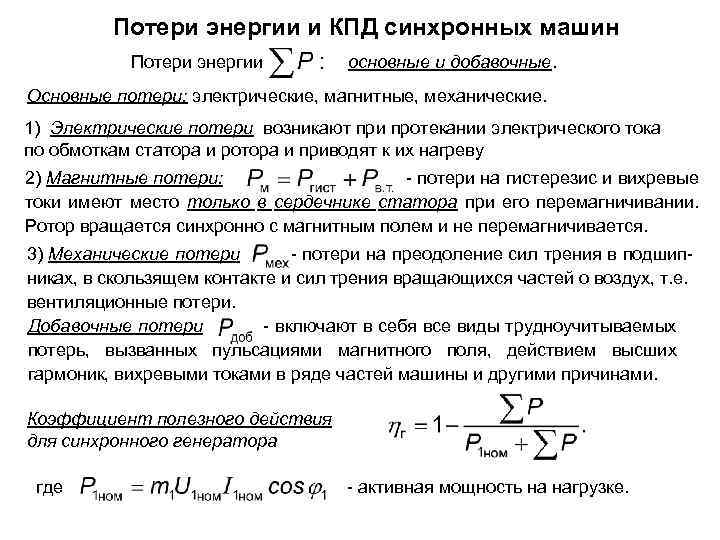
1) Основные потери включают в себя:
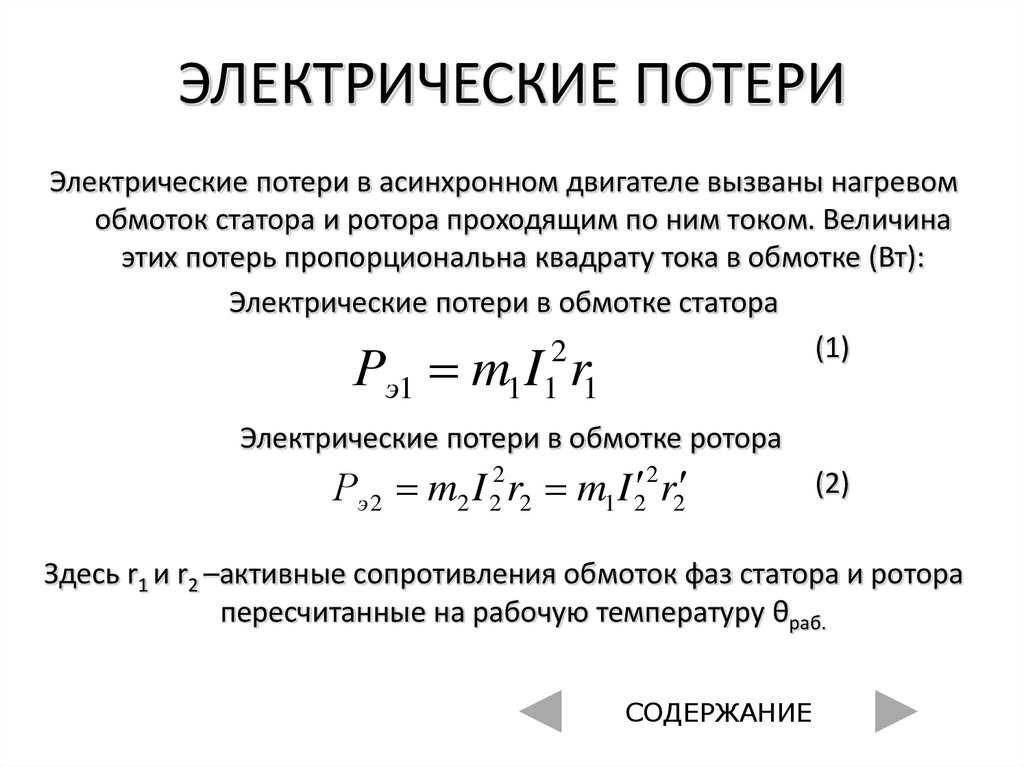
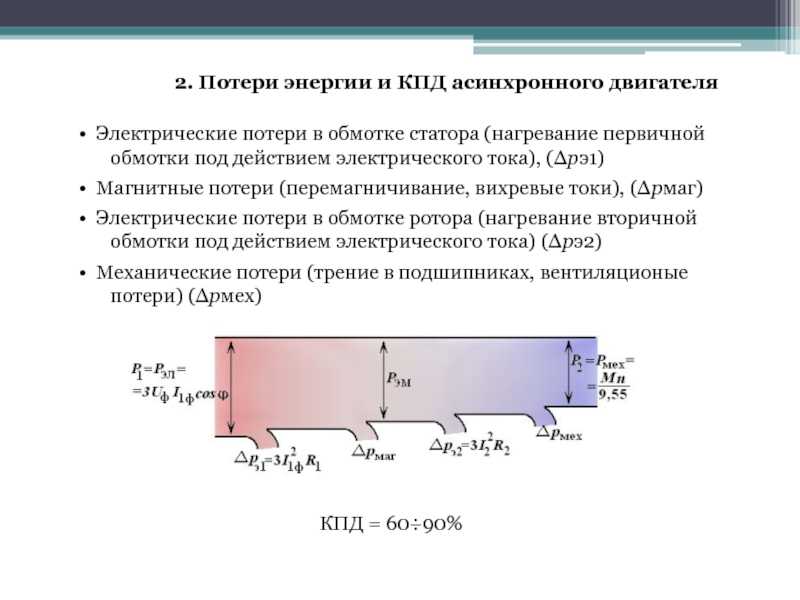
а) электрические Pэ – вызваны нагревом обмоток статора и ротора,
б) магнитные Pм – вызваны потерями на гистерезис и вихревые токи,
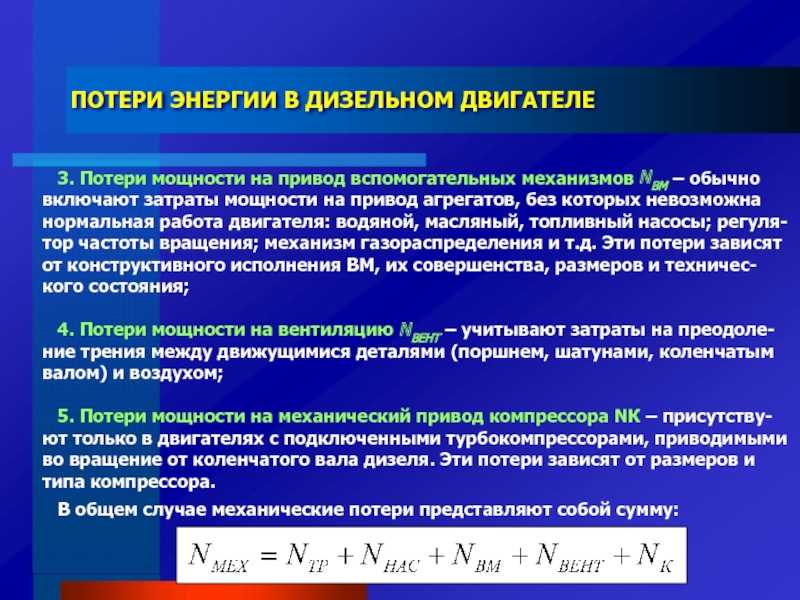
в) механические Рмех – потери на вентиляцию, на трение в подшипниках, на трение движущихся частей о воздух.
2) Добавочные потери Pдоб – включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсаций магнитной индукции в зубцах и другими причинами.
Сумма всех потерь асинхронного двигателя:
∑P = Pэ+Pм+Рмех+Pдоб.
КПД асинхронного двигателя η определяется отношением полезной мощности P2 к потребляемой мощности P1:
η = P2/P1 = 1-∑P/P1.
КПД с изменением нагрузки меняет свою величину: в режиме х. х. η = 0, затем с ростом нагрузки увеличивается, достигая максимума при нагрузке (0,7÷0,8) Pном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2˃Pном) он резко убывает, т. к. при этом растут потери. КПД трёхфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = (75÷88)%, для двигателей мощностью более 10кВт ηном = (90÷94)%.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: На стипендию можно купить что-нибудь, но не больше. 9023 —
91.146.8.87 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock! и обновите страницу (F5)очень нужно
5.15. ДВУХФАЗНЫЙ КОНДЕНСАТОРНЫЙ ДВИГАТЕЛЬ
Двухфазный конденсаторный
двигатель имеет на статоре две обмотки ОВ и ОУ, рассчитанные на длительное протекание
тока. Обмотки располагаются в пространстве под углом 90 эл. градусов), а последовательно
одной из них включают конденсатор С.
Двухфазный конденсаторный
двигатель переменного тока обладает вращающимся магнитным полем (правда, не
круговым, а эллиптическим). Поэтому он не нуждается в специальных пусковых устройствах
(рис. 5.15 1.).
Двухфазный асинхронный
двигатель, в отличие от трехфазного, имеет возможность плавного регулирования
частоты вращения ротора.
Делается это одним из двух
способов: амплитудным (изменением напряжения Uy) и фазным (изменением емкости
конденсатора С).
Двухфазные двигатели получили
широкое распространение в бытовых приборах и лабораторной практике.
В отличие от рассмотренных
выше типов двигателей, интересен двигатель с полым ротором. Он имеет два статора,
между которыми располагается ротор (рис. 5.15.2.).
Наружный статор 1 имеет
обычно конструкцию с двухфазной обмоткой 4. Фазные обмотки сдвинуты в пространстве
относительно друг друга на 90°. Внутренний статор 3 представляет
собой пакет электротехнической стали без обмотки. В воздушном зазоре между
статорами помещен ротор двигателя 2, который не имеет обмотки и выполнен в виде
стакана с тонкими стенками из немагнитного материала (алюминия). Посредством
втулки 6 ротор укреплен на валу двигателя 5. Такая конструкция обеспечивает
ему незначительную инерцию и делает двигатель чувствительным даже к небольшим
импульсам (сигналам) тока. Этому также способствует наличие второго статора,
который уменьшает сопротивление магнитной цепи. Одна из фаз обмоток статора
включается на напряжение сети Uс, другая является управляющей обмоткой.
Когда напряжение на ней отсутствует, ротор неподвижен. С появлением управляющего
сигнала Uу достаточной величины статор создает двухфазное вращающееся
поле, и двигатель развивает вращающий момент, величина которого пропорциональна
Uc.
Работа этого двигателя
основана на взаимодействии магнитного поля статора с вихревыми токами, наведенными
на поверхность полого ротора.
Машины с полым ротором
весьма чувствительны к изменениям напряжения сигнала и его продолжительности,
что дает возможность применять их в качестве исполнительных двигателей.
5.18.4 Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта (рис. 5.18.4.1)
устроена по принципу асинхронного двигателя и служит для соединения двух частей
вала. На ведущей части вала 1 помещается полюсная система 2, представляющая
собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток
в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты
3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного
двигателя, только вращающийся магнитный поток здесь создается механическим вращением
полюсной системы. Вращающий момент от ведущей части вала к ведомой передается
электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять
дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее
применяют в автоматике и телемеханике.
5.14. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Статор однофазного двигателя
имеет однофазную обмотку, которая занимает 2/3 общего числа пазов статора. Ротор
— коротко-замкнутый.
При подключении к сети
однофазная статорная обмотка создает не вращающийся, а пульсирующий магнитный
поток с амплитудой Ф. Этот поток может быть искусственно разложен на два вращающихся
потока ФI и ФII, каждый из которых равен Ф/2. Обозначим
ФI прямым потоком, а ФII — обратным. Частота вращения
каждого потока — n1I=n1II=n1.
Предположим, что ротор
двигателя уже вращается в направлении прямого потока. Тогда скольжение двигателя
относительно прямого потока ФI равно:
,
а относительно обратного потока:
.
Потоки ФI и
ФII наводят в обмотке ротора ЭДС E2I и E2II,
которые создают токи I2I и I2II. Известно, что частота
тока в обмотке ротора пропорциональна скольжению f2=Sf1.
Т.к. SII>SI, то ток, наведенный обратным полем, имеет
частоту намного больше частоты, наведенной в обмотке ротора прямым полем f2II>f2I.
Пусть n1=1500 об/мин, n2=1450 об/мин, f1=50 Гц, тогда:
Нам также известно, что
индуктивное сопротивление роторной обмотки x2 зависит от частоты
f2:
Поскольку f2I<<f2II,
то и сопротивление x2I<<x2II
Переходя к токам I2,
которые, как известно, обратно пропорциональны сопротивлениям x2,
можно записать: I2I>>I2II.
Вращающие моменты двигателя
пропорциональны магнитным потокам статора и токам в обмотке ротора. (М~ФI2).
Исходя из значений токов
I2I и I2II и учитывая, что ФI=ФII
можно записать:
Следовательно, если ротор
двигателя уже вращается в сторону прямого потока, то он будет продолжать вращаться
в этом направлении. Тормозящее воздействие МII не будет оказывать
заметного влияния на работу двигателя.
Вспомним, что мы условно
предполагали вращение ротора в сторону прямого потока ФI. А если
бы он вращался вначале в сторону обратного потока ФII?
Тогда, проведя аналогичные
рассуждения, можно заключить, что ротор будет устойчиво вращаться в сторону
обратного потока. Рассмотрим механическую характеристику однофазного двигателя
(рис. 5.14.2).
Из характеристики М=f(S)
видно, что при пуске, когда S=1, пусковой момент Мп=О. Двигатель
при включении его в сеть сам не начнет вращаться. Необходим его сдвиг в ту или
иную сторону.
Если сдвинуть точку Мп
влево от S=1, то момент будет положительным, если вправо — отрицательным.
Другими словами, направление
устойчивого вращения ротора двигателя будет зависеть от направления первоначального
импульса.
Проведенный анализ показал, что однофазный двигатель нуждается в принудительном пуске.
Пусковые устройства могут быть механическими (пуск от руки) и электрическими.
Первый способ пуска практически выжил себя, и на его смену пришел второй — электрический.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой.
Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Однофазный двигатель, таким
образом, превратился в двухфазный. Двухфазный двигатель обладает вращающимся
магнитным полем, если выполнены два обязательных условия.
Первое условие состоит
в пространственном сдвиге рабочей и пусковой обмоток на 90 эл. градусов. Такое
условие, легко реализуется на заводе-изготовителе.
Второе обязательное условие
диктуется сдвигом по фазе тока в пусковой обмотке на 90° относительно тока в
рабочей обмотке. Выполнение этого условия связано с включением в пусковую обмотку
фазосдвигающего элемента, например, конденсатора (рис. 5.14.3).
После того как ротор двигателя
придет во вращение, пусковую обмотку ПО отключают. Делается это с
помощью выключателя В. Иногда в бытовой технике отключение пусковой обмотки
производится автоматически по ходу разгона двигателя.
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.
Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментов
DM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Слайды и текст этой презентации
![]()
Потери и КПД асинхронного двигателя
![]()
Потери энергии
Преобразование электрической энергии в механическую в АД (как и в других электрических машинах) связано с потерями энергии. Р2 = Р1 – ∑РР1 – мощность на входе (потребляемая мощность)Р2 – полезная мощность на выходе ∑Р — потери Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины.
![]()
∑Р (потери)
основные
добавочныеРдо6
Магнитные потери Рм (на гистерезис и вихревые токи)
Механические потери Рмех
Электрические потери Рэ = Рэ1 +Рэ2
![]()
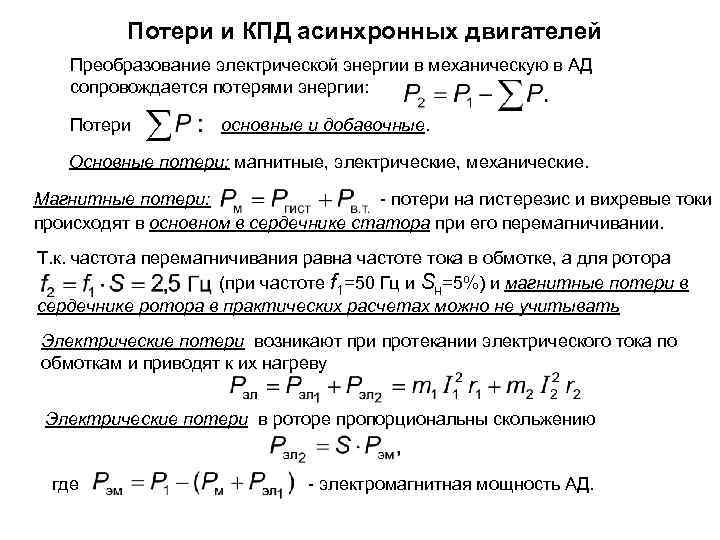
Магнитные потери
Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
![]()
Электрические потери
Рэ = Рэ1 +Рэ2электрические потери в обмотке статораРэ1 = m1 I21 r1 ; (13.2)электрические потери в обмотке ротора Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)Электрические потери в роторе прямо пропорциональны скольжению:Рэ2 = s Рэм (13.5)где Рэм — электромагнитная мощность АД, Вт:Рэм = Р1 = (Рм + Рэ1) (13-6)
![]()
Электрические потери
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.Чем меньше S, тем меньше РэВ асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В — переходное падение напряжения на пару щеток.

![]()
Механические потери
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Рмех = n22 – (пропорциональны частоте вращения ротора)В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
![]()
Добавочные потери
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами.В соответствии с ГОСТом Рдо6 = 0,005 Р1. (13.7)При расчете добавочных потерь для неноминального режима следует пользоваться выражениемР′доб = Рдоб β2 (13-8)где β = I1/ I1ном —коэффициент нагрузки.
![]()
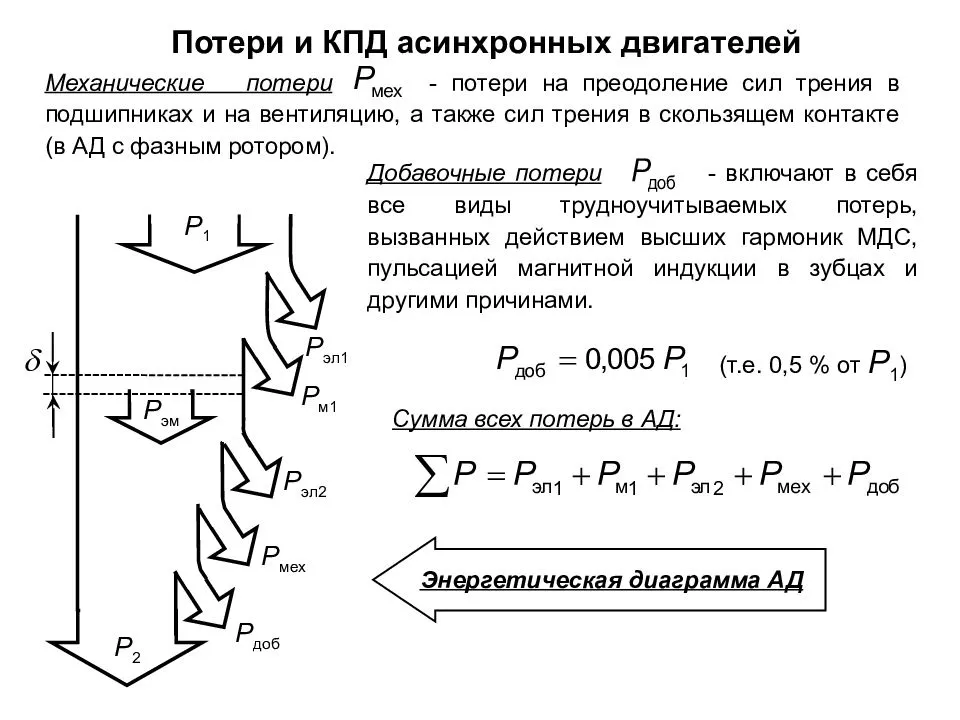
Сумма всех потерь АД
Сумма всех потерь АД (Вт) ∑P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
![]()
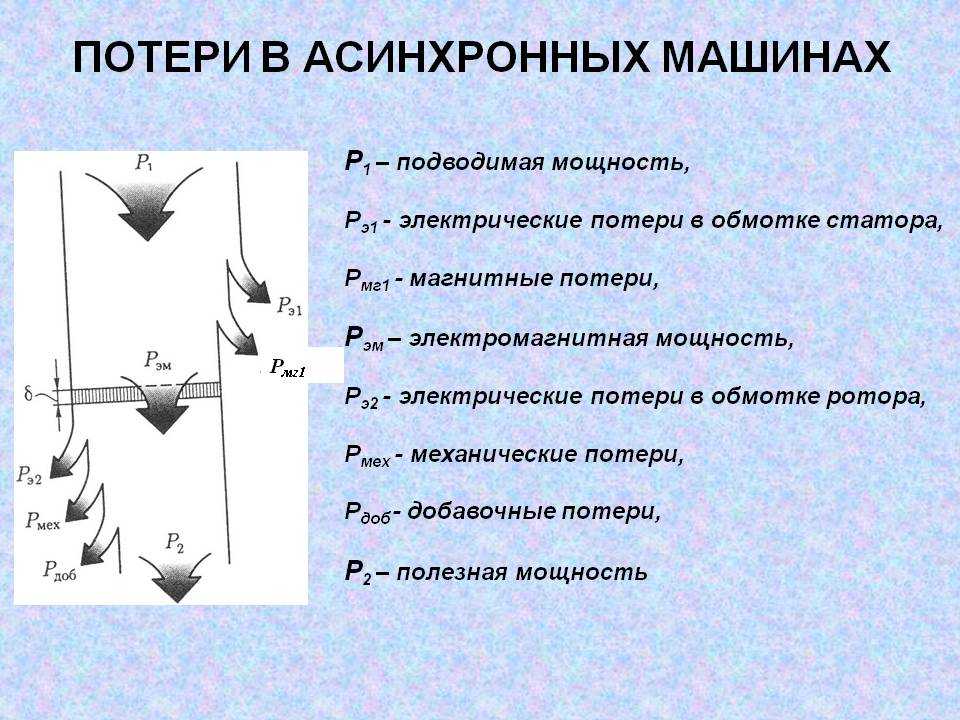
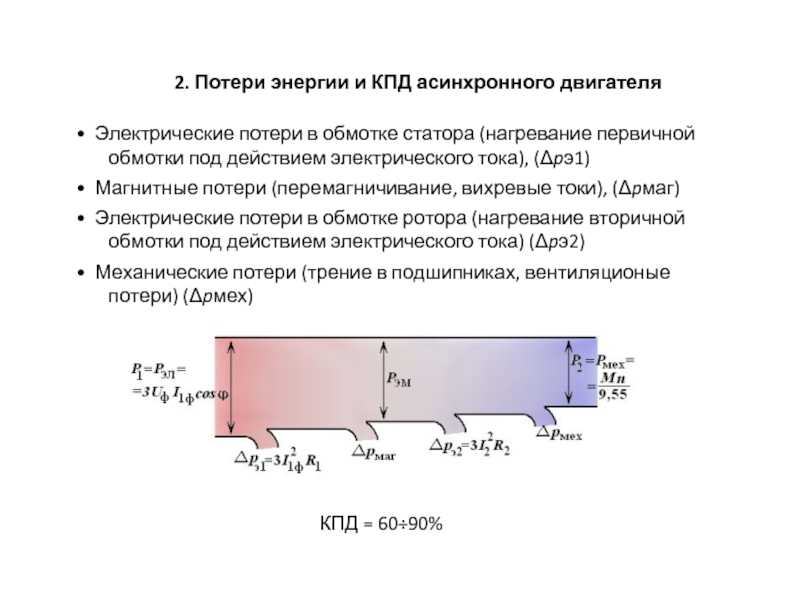
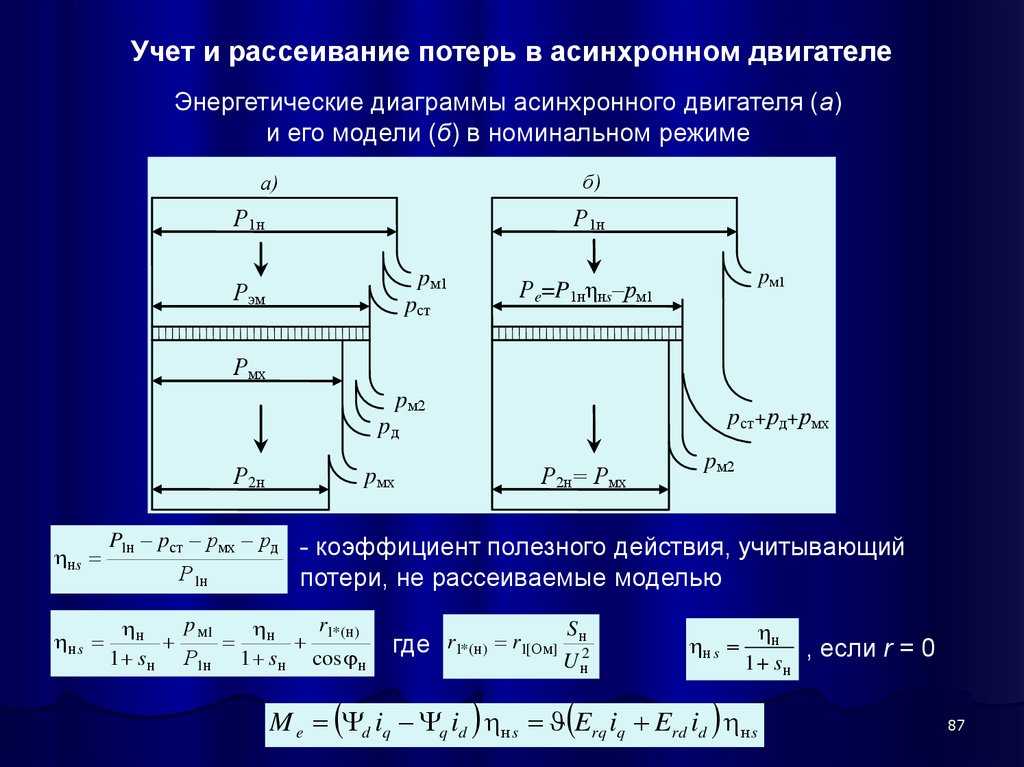
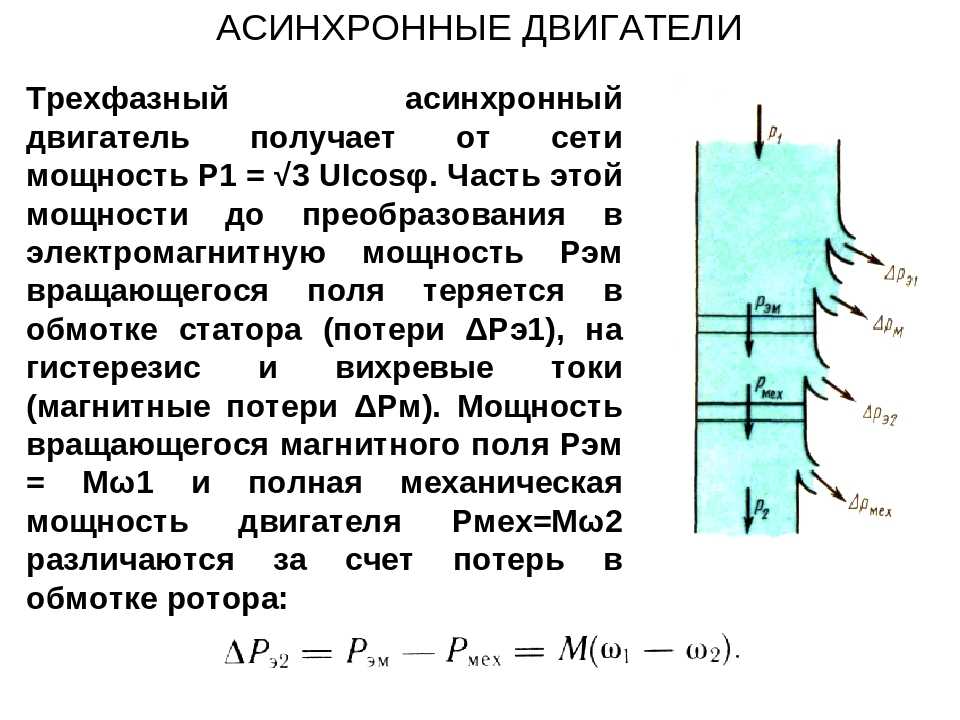
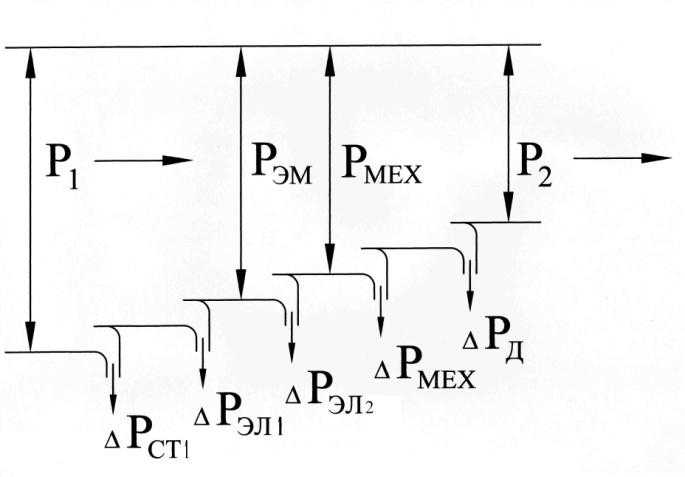
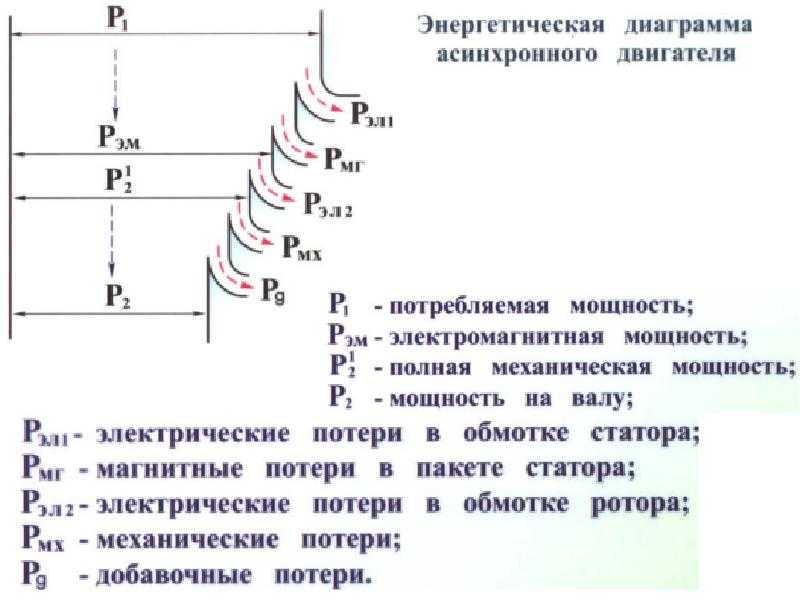
Энергетическая диаграмма АД
видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные РМ1 и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
![]()
Величина потерь
РЭ1 и РЭ2 (электрические потери в обмотках ) — переменные потери, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора . Рдо6 — переменные потери (13.8). Рм и Рмех — практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
![]()
КПД АД
η = Р2/ Р1 =1 -∑ PКПД АД с изменениями нагрузки также меняет свою величину: в режиме х.х. КПД η = 0, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке ηмах = (0,7 ÷ 0,8)Рном.
При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности.
![]()
Переменные потери
![]()
Эти потери также называются потерями меди. Данные потери происходят из-за электрического тока, идущего по обмоткам статора и ротора. Когда нагрузка меняется, данный электрический ток также изменяется, а потому и потери эти тоже претерпевают изменения. Поэтому их и назвали переменными потерями. Их можно получить при помощи проведения теста с заблокированным ротором трёхфазного двигателя.
Основная функция асинхронного двигателя состоит в том, чтобы преобразовывать электрическую энергию в механическую энергию. В течение данного преобразования одной энергии в другую, энергия проходит через различные этапы. Данная энергия, проходящая через разные ступени, отображается на диаграмме течения энергии.
Часть этой энергии на входе используется для поддержки потери статора, которыми являются потери железа статора и потери меди статора. Сохраняющаяся энергия (электроэнергия на входе – потери статора) идёт на ротор как вход на ротор. Так что вход на ротор, P2 = Pin – потери статора (потери меди статора и потери железа статора). Теперь ротор должен преобразовать этот вход на ротор в механическую энергию, но этот завершённый вход не может быть преобразован в механический выход, поскольку он должен поддерживать потери ротора.
Бывает два типа потерь ротора, а именно потери меди и потери железа. Потери железа зависят от частоты ротора, которая очень мала, когда ротор вращается. Поэтому этим обычно пренебрегают. Так что можно сказать, что ротор имеет лишь потери меди. По этой причине вход на ротор должен поддерживать эти потери меди. После этой поддержки, оставшаяся часть входа ротора, P2 преобразовывается в механическую энергию, Pm.
Теперь эта создаваемая механическая энергия идёт на нагрузку за счёт вала, но появляются некоторые механические потери, такие как потери трения и потери сопротивления воздуха. Так что общая воспроизводимая механическая энергия должна быть подана на поддержание этих потерь.
Поэтому выход образуемой энергии идёт на вал, который в конечном итоге подаёт её нагрузке, Pout. Pout = Pm – механические потери (потери трения, а также потери, связанные с сопротивлением воздуха). Pout зовется энергией вала. Также его называют полезной энергией.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
5.18.2 Индукционные регуляторы и фазорегуляторы
Индукционные регуляторы напряжения представляют
собой заторможенный асинхронный двигатель с фазовым ротором. Им можно регулировать
напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены
электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом
ротора. При подключении индукционного регулятора к сети вращающийся магнитный
поток наводит в обмотках статора и ротора ЭДС E1 и E2.
При совпадении осей в обмотках ЭДС E1 и E2 совпадают по
фазе, а на выходных зажимах регулятора устанавливается максимальное значение
напряжения.
При повороте ротора оси обмоток поворачиваются
на некоторый угол a. На такой же угол смещается и вектор E2.
При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы
устанавливаем на выходе минимальное напряжение.
Фазорегулятор предназначен для изменения фазы вторичного
напряжения относительно первичного. При этом величина вторичного напряжения
остается неизменной.
Фазорегулятор представляет собой асинхронную машину,
заторможенную специальным поворотным устройством. Напряжение подводится к статорной
обмотке, а снимается с роторной. В отличие от индукционного регулятора здесь
обмотки статора и ротора электрически не соединены. Изменение фазы вторичного
напряжения осуществляется поворотом ротора относительно статора.
Применяется в автоматике и измерительной технике.