Info
- Publication number
- RU2159494C1
RU2159494C1
RU99107362/09A
RU99107362A
RU2159494C1
RU 2159494 C1
RU2159494 C1
RU 2159494C1
RU 99107362/09 A
RU99107362/09 A
RU 99107362/09A
RU 99107362 A
RU99107362 A
RU 99107362A
RU 2159494 C1
RU2159494 C1
RU 2159494C1
Authority
RU
Russia
Prior art keywords
inductor
armature
magnetic
autonomous
protrusions
Prior art date
1999-04-12
Application number
RU99107362/09A
Other languages
English (en)
Inventor
Е.Н. Чернова
Д.А. Бут
Original Assignee
Московский государственный авиационный институт (технический университет)
Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.)
1999-04-12
Filing date
1999-04-12
Publication date
2000-11-20
1999-04-12Application filed by Московский государственный авиационный институт (технический университет)
filed
Critical
Московский государственный авиационный институт (технический университет)
1999-04-12Priority to RU99107362/09A
priority
Critical
patent/RU2159494C1/ru
2000-11-20Application granted
granted
Critical
2000-11-20Publication of RU2159494C1
publication
Critical
patent/RU2159494C1/ru
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
|
RU2499344C1 * |
2012-04-16 | 2013-11-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Казанский национальный исследовательский технический университет им. А.Н. Туполева-КАИ» | Синхронный электродвигатель |
|
RU2547813C1 * |
2014-05-05 | 2015-04-10 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Уфимский государственный авиационный технический университет» | Вентильно-индукторный двигатель |
|
RU2571955C1 * |
2014-09-08 | 2015-12-27 | Александр Дмитриевич Петрушин | Вентильно-индукторная электрическая машина |
|
RU2658654C2 * |
2016-12-13 | 2018-06-22 | Общество с ограниченной ответственностью Научно-производственное предприятие «Донские технологии» | Способ бездатчикового управления линейным возвратно-поступательным вентильно-индукторным парнофазным генератором |
|
RU172453U1 * |
2016-12-26 | 2017-07-11 | Федеральное государственное бюджетное образовательное учреждение высшего образования «Тульский государственный университет» (ТулГУ) | Вентильно-реактивный генератор |
|
RU189298U1 * |
2018-03-23 | 2019-05-21 | Общество с ограниченной ответственностью Научно-производственное предприятие «Донские технологии» | Линейный вентильно-индукторный электрический генератор возвратно-поступательного действия |
|
RU2727956C1 * |
2019-06-07 | 2020-07-28 | Михаил Иванович Новиков | Электродвигатель |
|
RU2757423C1 * |
2021-04-01 | 2021-10-15 | федеральное государственное бюджетное образовательное учреждение высшего образования «Казанский национальный исследовательский технический унивреситет им. А.Н. Туполева — КАИ» | Синхронный электродвигатель |
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Двухфазные модели
Двухфазные вентильные электродвигатели можно собрать самостоятельно. Для этого специалисты рекомендуют использовать мощные бендиксы. В некоторых случаях применяются статоры с первичной обмоткой. Для фиксации ротора потребуется прочный корпус. В данном случае наконечники следует использовать с хорошей проводимостью.
Для того чтобы электромагнитное поле усиливалось равномерно, применяются катушки различной чувствительности. Втягивающие реле устанавливаются позади статоров. Вал в конструкция обязан находиться на диске. Для его фиксации применяются шпонки.
![]()
Смотреть галерею
Преимущества
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
— возможность применения широкого диапазона для модифицирования частоты вращения;
— высокая динамика и быстродействие;
— максимальная точность позиционирования;
— небольшие затраты на техническое обслуживание;
— устройство можно отнести к взрывозащищенным объектам;
— имеет способность переносить большие перегрузки в момент вращения;
— высокий КПД, который составляет более 90%;
— имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
— при длительной работе нет перегрева электродвигателя.
Показатели двигателей
Показателями двигателя называют величины, характеризующие его работу. Помимо конструктивных параметров, они зависят от особенностей и настроек систем питания и зажигания, степени износа деталей и пр.
Давление в конце такта сжатия (компрессия) является показателем технического состояния (изношенности) цилиндро-поршневой группы и клапанов.
Крутящий момент на коленчатом валу двигателя определяет силу тяги на колесах: чем он больше, тем лучше динамика разгона автомобиля. Равен произведению силы на плечо (рис. 3) и измеряется в Н·м (Ньютон на метр), ранее в кгс.м (килограмм-сила на метр).
Крутящий момент увеличивается с ростом:
рабочего объема . Поэтому двигатели, которым необходим значительный крутящий момент, обладают большим объемом;
давления горящих газов в цилиндрах, которое ограничено детонацией (взрывное горение бензо-воздушной смеси, сопровождаемое характерным звонким звуком. Ошибочно называется «стуком поршневых пальцев») или ростом нагрузок в дизелях.
Максимальный крутящий момент двигатель развивает при определенных оборотах (см. ниже), они вместе с его величиной указываются в технической документации.
Мощность двигателя — величина, показывающая, какую работу он совершает в единицу времени, измеряется в кВт (ранее в лошадиных силах). Одна лошадиная сила (л.с.) приблизительно равняется 0,74 кВт. Мощность равна произведению крутящего момента на угловую скорость коленвала (число оборотов в минуту, умноженное на определенный коэффициент).
Двигатели большей мощности производители получают увеличением:
рабочего объема, что, в свою очередь, приводит к росту габаритов двигателя и ограничению допустимых максимальных оборотов из-за значительных сил инерции увеличившихся деталей;
оборотов коленчатого вала, число которых ограничено инерционными силами и увеличением износа деталей. Высокооборотный двигатель одинаковой мощности (при прочих равных условиях — конструкции двигателя, технологии изготовления, применяемых материалах и т.д.) с низкооборотным обладает меньшим сроком службы, так как в среднем для одного и того же пробега его коленчатый вал будет совершать больше оборотов;
давления в цилиндре путем повышения степени сжатия либо наддувом воздуха посредством турбо- или механических нагнетателей. Для применения наддува степень сжатия вынужденно уменьшают для предотвращения детонации (у бензиновых двигателей) и снижения жесткости работы (повышенные нагрузки в цилиндро-поршневой группе дизеля, сопровождаемые чрезмерным шумом) (у дизелей). Наддув позволяет, например, сохранить мощность при меньшем рабочем объеме.
Номинальная мощность — гарантируемая производителем мощность при полной подаче топлива на определенных оборотах. Именно она, а не максимальная мощность, указывается в технической документации на двигатель.
Удельный расход топлива — это количество топлива, расходуемого двигателем на 1 кВт развиваемой мощности за один час. Является показателем совершенства конструкции двигателя: чем расход ниже, тем более эффективно используется энергия сгорающего в цилиндрах топлива.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:






S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
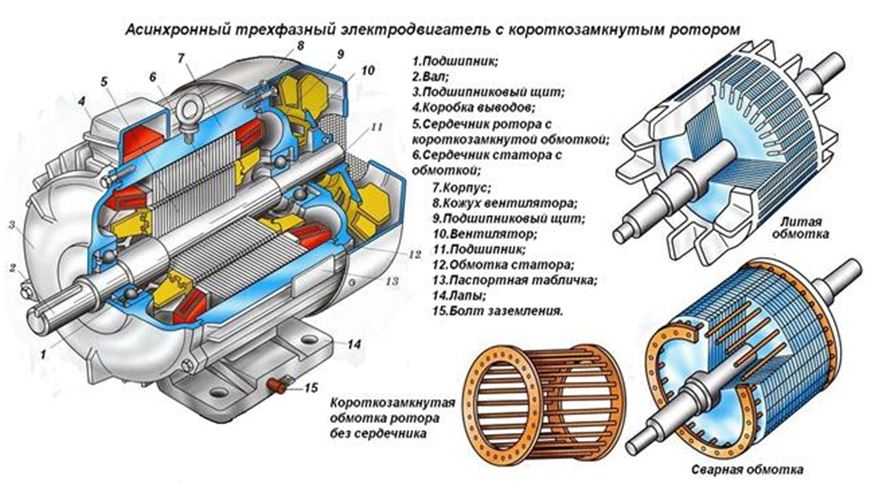
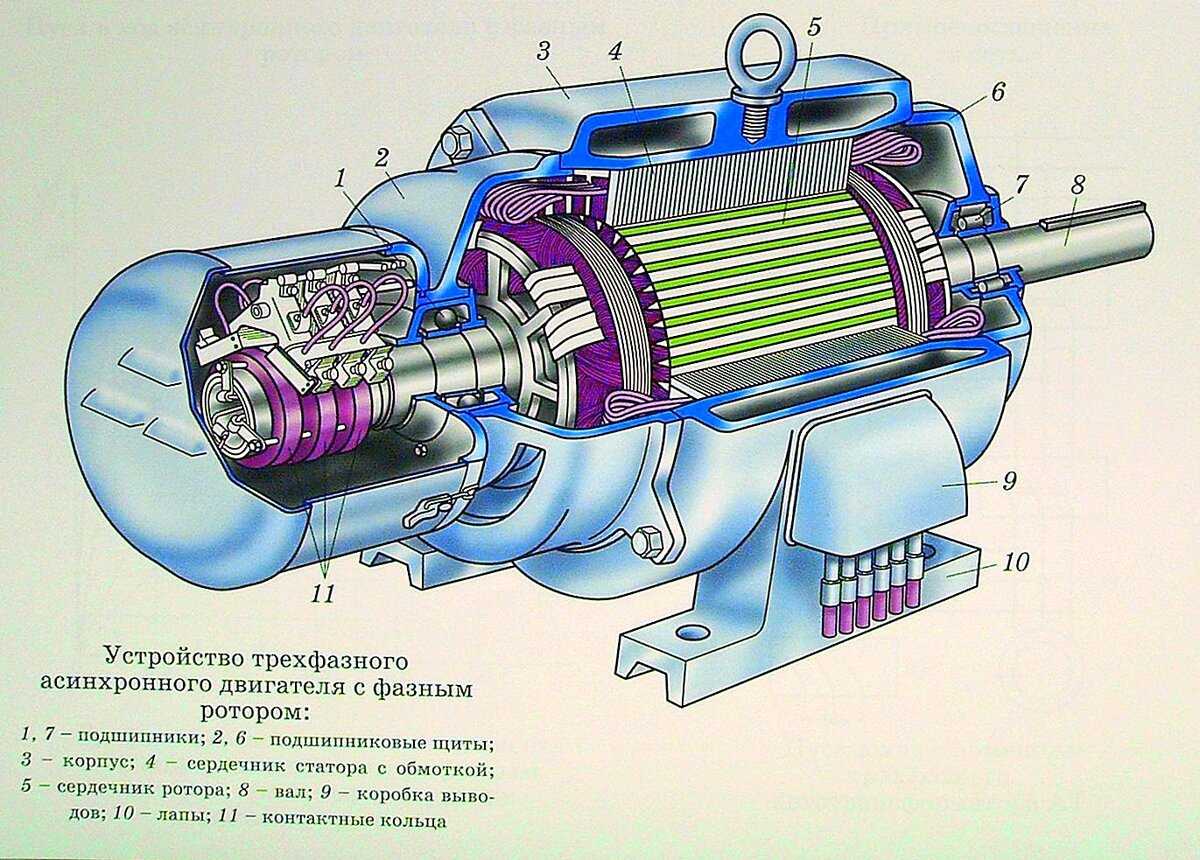
Строение асинхронного двигателя
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.
- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.
Принцип работы
Машина с ДВС (двигателем) должна ездить, а для этого ей необходимо совершить механическое усилие. Именно его и производит двигатель, который передает вращательную силу на колеса автомобиля. Те вращаются, и транспортное средство начинает движение. Это очень примитивное объяснение, которое позволит лишь отдаленно понять, что это такое – ДВС в машине. Главная цель двигателя – преобразование бензина (или дизельного топлива) в механическое движение. Сегодня самый простой способ заставить автомобиль двигаться – это сжечь топливо внутри мотора. Именно поэтому двигатель внутреннего сгорания получил соответствующее название. Все они работают по одинаковому общему принципу, хотя есть некоторые разновидности: дизельные, с карбюраторными или инжекторными системами питания и так далее.
Итак, принцип мы поняли: топливо сгорает, высвобождает при этом большие объемы энергии, которые толкают механизмы в двигателе, что приводит к вращению коленчатого вала. Усилия затем передаются на колеса, и машина начинает движение.
Принцип работы четырехтактного двигателя
Такты четырехтактного двигателя
Четырехтактные двигатели используются во всех автомобилях, крупной технике, авиации
Это так называемый классический вид ДВС, которому конструкторы уделяют всё свое внимание. Условно работу каждого цилиндра в ЦПГ можно разделить на 4 этапа (такта)
Это впуск, сжатие, сгорание, выпуск. На видео, ниже, наглядно показано работу 4-тактного двигателя в 3Д анимации.
https://youtube.com/watch?v=yZ8w_WEMbEU
- На такте впуска поршень в цилиндре движется вниз, от клапанов к нижней мертвой точке (НМТ). Когда он начинает опускаться, открывается впускной клапан и в цилиндр поступает топливно-воздушная смесь (или только воздух, если двигатель с непосредственным впрыском). При движении поршень сам «накачивает» нужный объем воздуха в камеру сгорания, если двигатель атмосферный, или воздух поступает под напором, если установлен турбонаддув.
- Дойдя до нижней мертвой точки поршень начинает подниматься. При этом впускной клапан закрывается, и при движении поршень сжимает воздух с распыленным в нём топливом до критического давления.
- Как только поршень условно доходит до верхней мертвой точки и компрессия становится максимальной, срабатывает свеча зажигания и топливо вспыхивает (дизтопливо зажигается при сжатии само, без искры). Микровзрыв от вспышки толкает поршень снова вниз, к НМТ.
- И на четвертом такте открывается выпускной клапан. Поршень снова движется вверх, выдавливая из камеры сгорания выхлопные газы в выпускной коллектор.
Работа четырехтактного двигателя
По сути, полезной работы в двигателе только один такт из четырех, когда при сгорании топлива создается избыточное давление, толкающее поршень. Остальные три такта нужны как вспомогательные, которые не дают импульса к движению, но на них расходуется энергия.
При таких условиях двигатель мог бы остановиться, когда кривошипно-шатунный механизм (КШМ) приходит к энергетическому равновесию. Но чтобы этого не произошло, используется большой маховик, соединенный с системой сцепления, и противовесы на коленвале, уравновешивающие нагрузки от работы поршней.
Принцип работы двухтактного двигателя
Такты двухтактного двигателя
Двухтактные двигатели используются не слишком широко. В основном это моторы скутеров и мопедов, легких моторных лодок, газонокосилок. Весь рабочий процесс такого двигателя можно разделить на два основных этапа:
- В начале движения поршня снизу вверх (от нижней мертвой точки к верхней) в камеру сгорания поступает топливно-воздушная смесь. Поднимаясь, поршень сжимает ее до критической компрессии, и когда он находится в верхней мертвой точке, происходит поджиг.
- Сгорая, топливо толкает поршень вниз, при этом одновременно открывается доступ к выпускному коллектору и продукты сгорания выходят из цилиндра. Как только поршень достигает нижней мертвой точки (НМТ), повторяется первый такт – впуск и сжатие одновременно.
Работа двухтактного двигателя
Казалось бы, двухтактный двигатель должен быть вдвое эффективней четырехтактного, ведь здесь на полезное действие приходится половина работы. Но в реальности мощность двухтактного двигателя намного ниже, чем хотелось бы, и причина этого кроется в несовершенном механизме газораспределения.
При сгорании топлива часть энергии уходит в выпускной коллектор, не выполняя никакой работы кроме нагрева. В итоге, двухтактные двигатели применяются только в маломощном транспорте и требуют особых моторных масел.
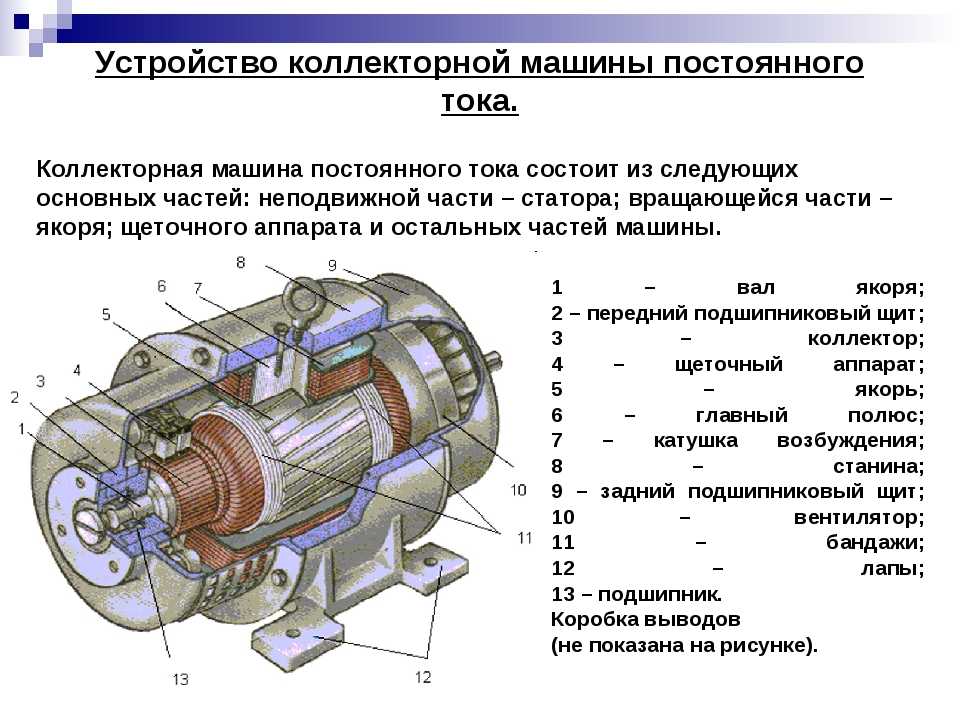
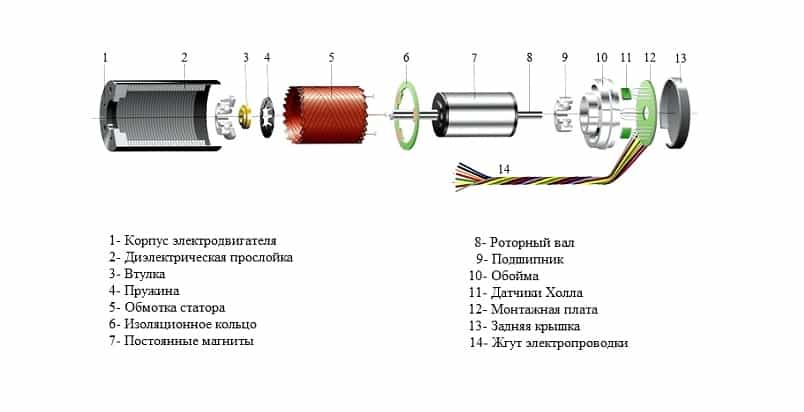
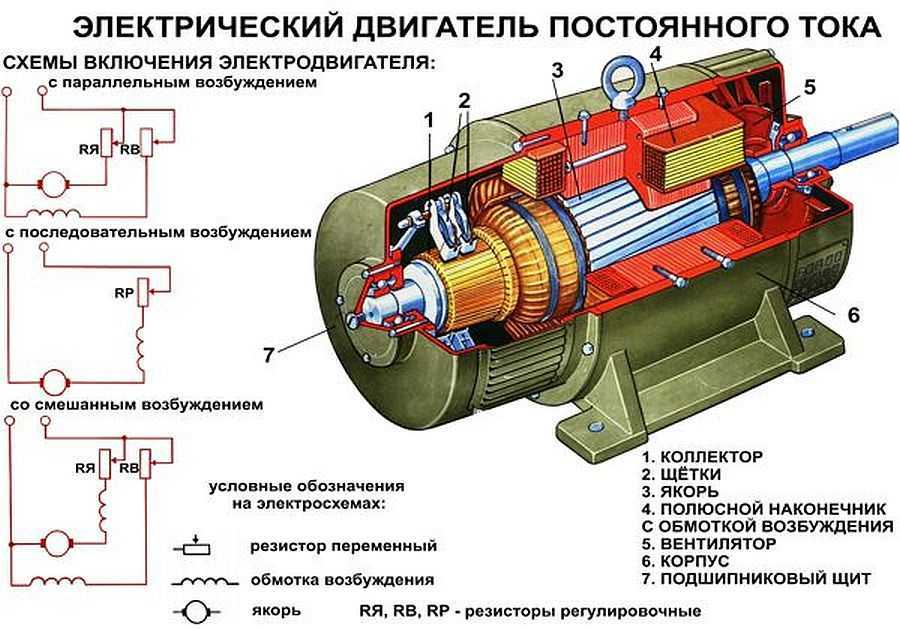
Конструкция и устройство двигателя
Техническая инфраструктура формируется двумя сегментами – непосредственно механикой и управляющим комплексом. С точки зрения конструкционного устройства агрегат во многом похож на традиционное наполнение электромеханических роторных двигателей. Соответственно, в состав электромотора входят ротор, статор и обмотка. Причем статор представляет собой набор из отдельных изолированных листов, выполненных из стального сплава. В процессе работы они способствуют понижению вихревых токов. В нем как раз и находится обмотка, которая может иметь разное количество фаз. Начинка элемента образована стальным сердечником, а обмотка представляет собой медные волокна. Для защиты применяется корпус, на поверхности которого также предусматриваются средства физического крепления.
Что касается ротора, то он сформирован постоянными магнитами. В зависимости от модификации, он может иметь до шестнадцати пар чередующихся полюсов. Прежде для изготовления роторов применялись ферритовые магниты, что было обусловлено их ценовой доступностью. Сегодня же на первый план выходят эксплуатационные характеристики вентильного двигателя – в частности крутящий момент, который варьируется от 1 до 70 Нм. Пропускная же частота в среднем находится в пределах 2-4 тыс. оборотов. Для достижения таких показателей требуется магнит с высокой степенью индукции, поэтому производители перешли на использование редкоземельных сплавов. Такие магниты не просто дают более высокую производительность, но и обладают меньшими размерами. Отчасти и этот переход способствовал оптимизации габаритов вентильного электродвигателя. Отдельно стоит рассмотреть компоненты управляющего сегмента.
Распиновка драйвера A4988
Драйвер A4988 имеет всего 16 контактов, которые связывают его с внешним миром. Распиновка у A4988 следующая:
Давайте ознакомимся со всеми контактами по очереди.
Выводы питания
На самом деле A4988 требует подключения двух источников питания.
VDD и GND используется для управления внутренней логической схемой. Напряжение питания должно находиться в пределах от 3 до 5,5 В.


Vmot и GND для обеспечения питания шагового двигателя. Тут напряжение в пределах от 8 до 35 В.
Согласно datasheet, для питания двигателя требуется соответствующий разделительный конденсатор рядом с платой, способный выдерживать ток 4 А.
Выводы выбора микрошага
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.
Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пяти ступенчатых разрешений.
По умолчанию эти три контакта подтянуты к земле внутренним резисторам. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления
Драйвер A4988 имеет два управляющих входа, а именно: STEP и DIR.
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращается по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы управления питанием A4988
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать это для экономии энергии.
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Выводы для подключения шагового двигателя
Выходные контакты: 1B, 1A, 2A и 2B.
К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
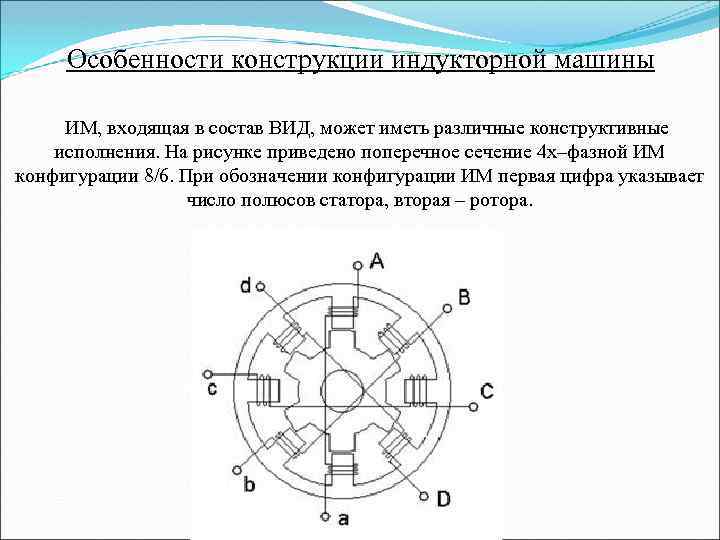
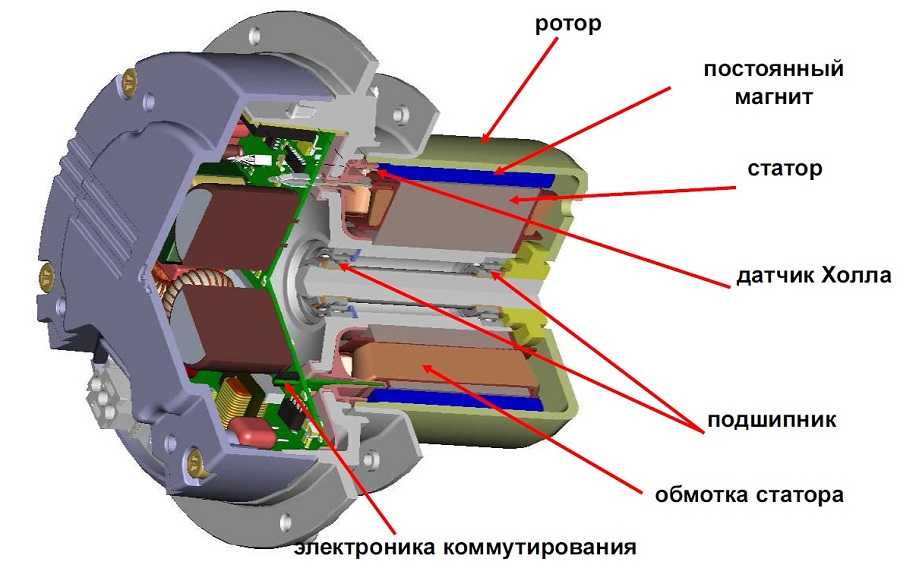
Конструкция и принцип работы
Конструктивно вентильный агрегат представляет собой разновидность синхронного двигателя.
В его состав входят:
- Ротор, как правило, из магнитного материала, реагирующий на воздействие электромагнитного поля.
- Статор, включающий в себя фазы обмоток, намотанные в катушки станину и диэлектрическую прокладку.
- Измерительные датчики (чаще всего Холла), позволяющие определить положение вращения вала.
- Микропроцессорный блок, формирующий импульсы, их форму, задающие частоту вращения ротора, сравнивающий показания датчиков и подаваемого переменного тока на фазные обмотки.
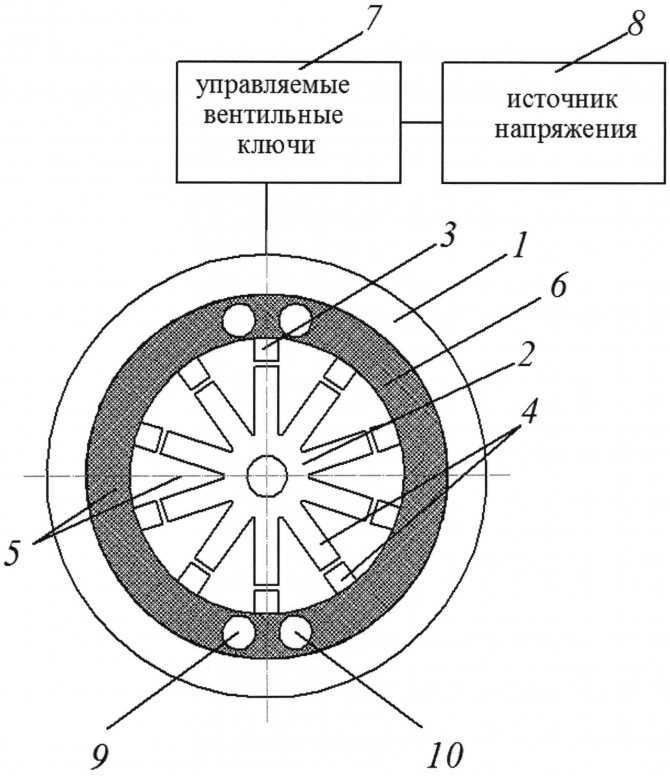
Пример конструкции вентильного двигателя приведен на рисунке ниже:
![]()
Рис. 1. Конструкция вентильного двигателя
Принцип работы вентильного двигателя заключается в четком позиционировании постоянных магнитов на роторе по отношению к формируемому пику электромагнитного импульса на фазных электрических обмотках. При движении магнитов датчики воспринимают информацию об их положении в пространстве и меняют пропускную способность реактивных вентильных преобразователей, что позволяет валу вращаться дальше. Таким образом, управление вращением осуществляется без использования скользящего контакта, поэтому данная категория электрических машин относится к категории бесколлекторных электродвигателей.
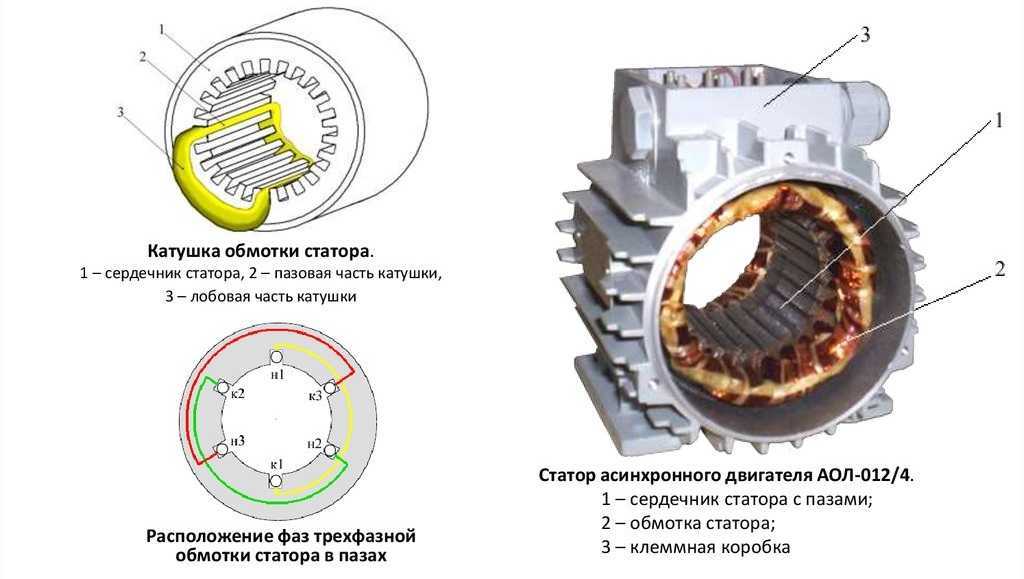
Статор
![]()
Рис. 2. Конструкция статора вентильного двигателя Конструктивно статор мало чем отличается от классических моделей синхронных и асинхронных двигателей. Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Полюса статора также могут характеризоваться смещением на строго определенный угол, как и его обмотки. По количеству фаз коммутации вентильные двигатели бывают двух-, трех-, четырех- и шестифазными.
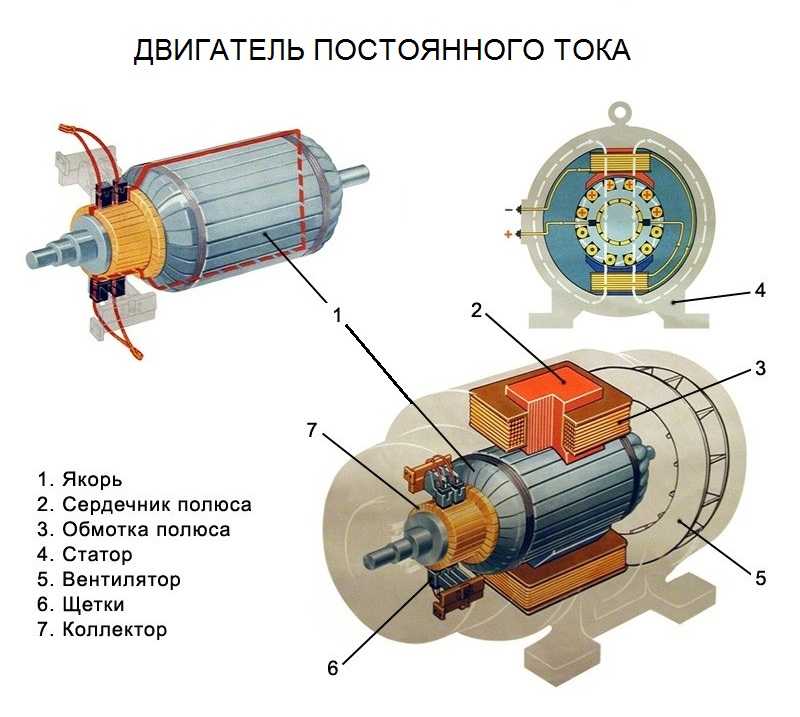
Ротор
В зависимости от конструкции ротора бесконтактные двигатели могут иметь внутрироторное и внешнероторное исполнение.
![]()
Рис. 3. Внешнероторные и внутрироторные модели
Количество пар полюсов также может отличаться, но уже без каких-либо привязок к обмоткам, как правило, этот параметр варьируется от двух до шестнадцати с парным шагом.
В более старых моделях для бесколлекторных двигателей использовались постоянные магниты из ферритовых сплавов. Которые отличались доступностью и относительно более низкой себестоимостью, но имели слишком низкие показатели индукции. Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.





![]()
Рис. 4. Вентильный двигатель с внешним ротором
Датчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.
![]()
Рис. 5. Датчик положения ротора Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
![]()
Рис. 6. Электронный ключ вентильного двигателя
Витковое замыкание в обмотке якоря
![]() Рис. 80. Раздвижной электромагнит для определения витковых замыканий в обмотках якорей: 1 — неподвижный Г-образный сердечник; 2 — намагничивающая обмотка; 3— подвижный сердечник; 4 — гайка; 5 — винт с рукояткой; 6 — направляющая полоса; 7 — стяжные изолированные шпильки.
Рис. 80. Раздвижной электромагнит для определения витковых замыканий в обмотках якорей: 1 — неподвижный Г-образный сердечник; 2 — намагничивающая обмотка; 3— подвижный сердечник; 4 — гайка; 5 — винт с рукояткой; 6 — направляющая полоса; 7 — стяжные изолированные шпильки.
При этой неисправности замкнутые витки чрезмерно перегреваются, машина искрит, обмотка дымит, появляется характерный запах горячей изоляции, генератор плохо возбуждается, двигатель плохо разворачивается. Кроме повреждений в самой обмотке, указанные признаки могут возникнуть из-за соединения коллекторных пластин между собой на рабочей поверхности коллектора и в петушках. Витковое замыкание в обмотке якоря можно найти с помощью раздвижного магнита переменного тока (рис. 80). Центры полюсов магнита устанавливают так, чтобы они приближались к точкам якоря, отстоящим один от другого на величину полюсного деления. В обмотку электромагнита включают ток, к пазам якоря, находящимся сверху электромагнита, подносят стальную линейку или ножовочное полотно, при наличии виткового замыкания линейка притягивается к пазу. Витковое замыкание может быть определено и методом милливольтметра. К коллекторным пластинам (рис. 79) подводят ток и замеряют между ними напряжение милливольтметром. При петлевой обмотке меньшие показания прибора соответствуют поврежденным секциям, а при волновой— дефектам в секциях одного обхода по якорю. Следовательно, в этом случае нужно присоединять щупы к пластинам, отстоящим одна от другой на шаг по коллектору. Если шаг по коллектору неизвестен, его можно определить по наименьшему показанию милливольтметра между коллекторными пластинами на расстоянии двойного полюсного деления. Проводя опыт, необходимо вначале присоединять щупы питания и наблюдать за показанием амперметра, а потом искать повреждение щупами милливольтметра.
При малых показаниях амперметра милливольтметр присоединять нельзя. Витковое замыкание имеют те секции, на которых милливольтметр дает минимальные показания. Неисправность устраняется по аналогии с соответствующей неисправностью в обмотке статора асинхронного двигателя.
Применение
Такие электродвигатели (частотные преобразователи) не используются в сетях постоянного тока. Но они имеют широкое применение во всех отраслях народного хозяйства. По статистике, до 70% электроэнергии, которая преобразуется в механическую энергию поступательного либо вращательного движения, потребляется именно индукционными электродвигателями.
Асинхронная машина не подключается к сети постоянного тока.
Асинхронные частотные преобразователи не требуют сложного производства и просты по своей конструкции, но в тоже время очень надежны. Такие двигатели могут работать от однофазной и трехфазной сети, используя разные частоты. Преобразователи не подходят для сетей постоянного тока. Для их управления применяют сравнительно несложные схемы.
При выборе асинхронного двигателя зачастую возникают проблемы с определением:
- его мощности;
- характеристик и приемлемой схемы, с помощью которой осуществляется управление электродвигателем;
- расчетом мощности конденсаторов, которые нужны, чтобы преобразователь работал от одной фазы;
- марки и сечения провода;
- устройств защиты и управления, которыми оснащен преобразователь.
Чтобы во всем этом разобраться, необходимо знать устройство и особенности работы асинхронного агрегата. Это поможет правильно подобрать преобразователь для решения конкретной задачи.
Индукционный агрегат свое название получил благодаря тому, что магнитное поле вращается с более высокой скоростью, чем сам ротор, поэтому последний всегда пытается «догнать» скорость вращения поля.
Свойства двигателя
![]()
Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.











