Скачать
Если тема интересует более глубоко, рекомендую ознакомиться с литературой, приведенной на странице Скачать.
Вот одна из книг, приведенных там:• Ломоносов, В.Ю.; Поливанов, К.М.; Михайлов, О.П. Электротехника. / Ломоносов, В.Ю.; Поливанов, К.М.; Михайлов, О.П. Электротехника. Одна из лучших книг, посвящённых основам электротехники. Изложение начинается с самых основ: объясняется, что такое напряжение, сила тока и сопротивление, приводятся указания по расчёту простейших электрических цепей, рассказывается о взаимосвязи и взаимозависимости электрических и магнитных явлений. Объясняется, что такое переменный ток, как устроен генератор переменного тока. Описывается, что такое конденсатор и что собой представляет катушка индуктивности, какова их роль в цепях переменного тока. Объясняется, что такое трёхфазный ток, как устроены генераторы трёхфазного тока и как организуется его передача. Отдельная глава посвящена полупроводниковым приборам: в ней речь идёт о полупроводниковых диодах, о транзисторах и о тиристорах; об использовании полупроводниковых приборов для выпрямления переменного тока и в качестве полупроводниковых ключей. Коротко описываются достижения микроэлектроники. Последняя треть книги целиком посвящена электрическим машинам, агрегатам и оборудованию: в 10 главе речь идёт о машинах постоянного тока (генераторах и двигателях); 11 глава посвящена трансформаторам; о машинах переменного тока (однофазных и трёхфазных, синхронных и асинхронных) подробно рассказывается в 12 главе; выключатели, электромагниты и реле описываются в главе 13; в главе 14 речь идёт о составлении электрических схем. Последняя, 15 глава, посвящена измерениям в электротехнике. Эта книга — отличный способ изучить основы электротехники, понять основополагающие принципы работы электрических машин и агрегатов., zip, 13.87 MB, скачан: 2392 раз./
Видео подключения мотора HDD
https://youtube.com/watch?v=Q2XsJOUNhFA
Подключил ещё двигатель от CD, погонял при питании 18 В, поскольку в моём внутри шарики, разгоняется так, что прыгает всё вокруг! Жаль не отследить обороты, но если судить по звуку то она очень большая, до тонкого свиста. Куда применять такие скорости, вот вопрос? Приходит на ум мини болгарка, настольная дрель, точильный станок… Применений много — думайте сами. Собирайте, тестируйте, делитесь впечатлениями. В интернете есть множество обзоров с применением данных двигателей в интересных самодельных конструкциях. В интернете видео видел, там кулибины с этими моторами помпы мастерят, супер вентиляторы, точилки, покумекать можно куда такие скоростя применить, мотор тут разгоняется свыше 27000 оборотов. С вами был Igoran.
Форум по обсуждению материала КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
|
|
||
|
|
Зачем нужен контроллер ESC
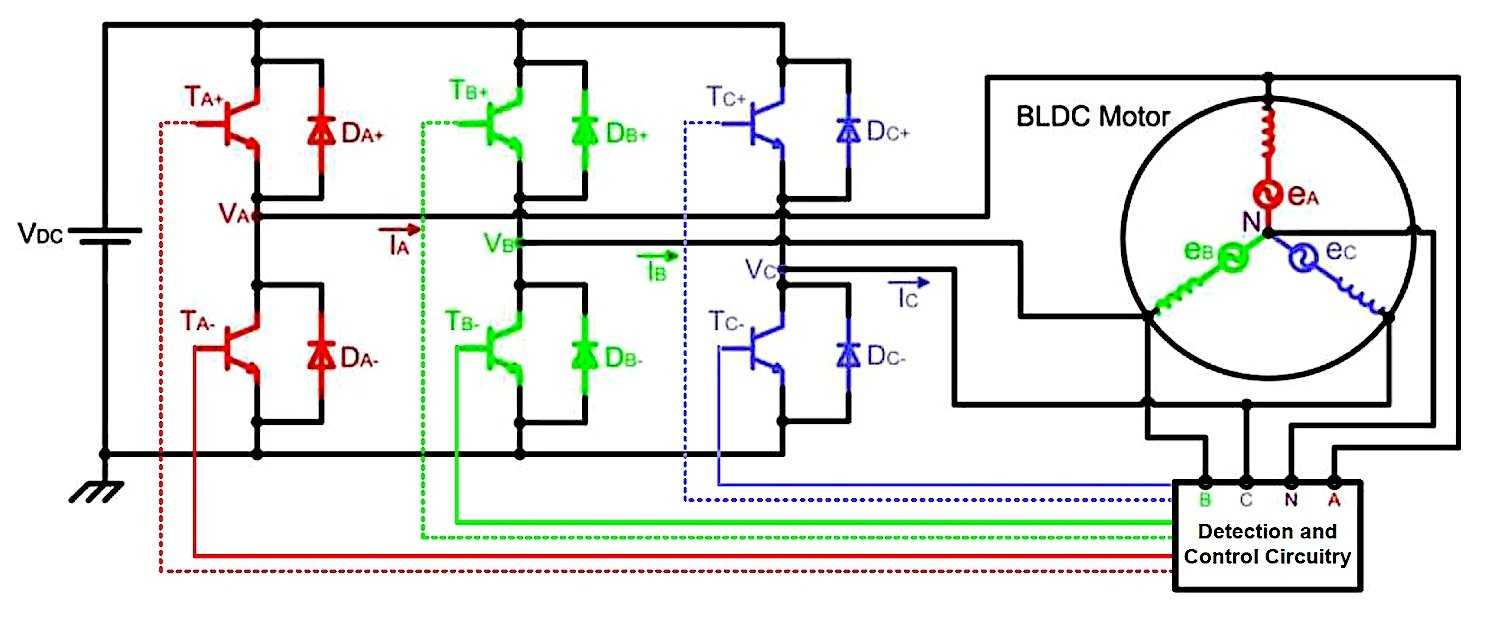
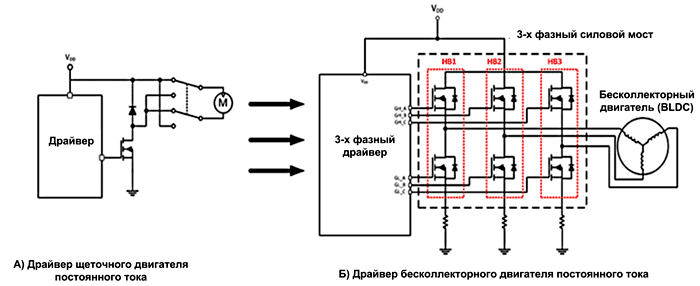
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.
![]()
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?
![]()
Существует несколько причин для этого:
большой крутящий момент, который очень важен для того чтобы оторвать летающее средство от земли;
эти двигатели доступны в формате OutRunner, что позволяет обойтись без сцепления в конструкции дрона;
маленький уровень вибраций во время работы, что очень важно для неподвижного зависания дрона в воздухе;
хорошее соотношение мощности к весу двигателя. Это очень важно для использования на летающих механизмах чтобы все элементы его конструкции имели как можно меньший вес
Обычный двигатель постоянного тока, обеспечивающий такой же крутящий момент как и BLDC двигатель, будет как минимум в два раза тяжелее него.
Как поменять направление вращения однофазного асинхронного двигателя: 2 схемы
Высока вероятность того, что АД запустили по одному из вышеперечисленных принципов, а он крутится не в ту сторону, что требуется для привода.
Другой вариант: на станке необходимо обязательно выполнять реверс для обработки деталей. Оба эти случаи поможет реализовать очередная разработка.
Возвращаю вас к начальной схеме, когда мы случайным образом объединяли концы главной и вспомогательной обмоток. Теперь нам надо сменить последовательность включения одной из них. Показываю на примере смены полярности пусковой обмотки.
В принципе так можно поступить и с главной. Тогда ток по этой последовательно собранной цепочке изменит направление одного из магнитных потоков и направление вращения ротора.
Для одноразового реверса этого переключения вполне достаточно. Но для станка с необходимостью периодической смены направления движения привода предлагается схема реверса с управлением тумблером.
Этот переключатель можно выбрать с двумя или тремя фиксированными положениями и шестью выводами. Подбирать его конструкцию необходимо по току нагрузки и допустимому напряжению.
Схема реверса однофазного АД с пусковой обмоткой через тумблер имеет такой вид.
Пускать токи через тумблер лучше от вспомогательной обмотки, ибо она работает кратковременно. Это позволит продлить ресурс ее контактов.
Реверс АД с конденсаторным запуском удобно выполнить по следующей схеме.
Для условий тяжелого запуска параллельно основному конденсатору через средний контакт с самовозвратом кнопки ПНВС подключают дополнительный конденсатор. Эту схему не рисую, она показана раньше.

Переключать положение тумблера реверса необходимо исключительно при остановленном роторе, а не во время его вращения. Случайная смена направления работы двигателя под напряжением связана с большими бросками токов, что ограничивает его ресурс.
Поэтому место расположения тумблера реверса на станке необходимо выбирать так, чтобы исключить случайное оперирование им во время работы. Устанавливайте его в углублениях конструкции.
Выбор подходящего двигателя
Чтобы подобрать агрегат, необходимо сравнить принцип работы и особенности коллекторных и бесколлекторных двигателей.
Слева направо: коллекторный двигатель и двигатель ФК 28-12 бесколлекторный
Коллекторные стоят меньше, но развивают невысокую скорость вращения крутящего момента. Они работают от постоянного тока, имеет небольшой вес и размер, доступный ремонт по замене деталей. Проявление негативного качества выявляется при получении огромного количества оборотов. Щетки контактируют с коллектором, вызывая трение, что может повредить механизм. Работоспособность агрегата снижается.
Система arduino
Часто для управления бесколлекторными двигателями используется аппаратная вычислительная платформа arduino. В основе находится плата и среда разработки на языке Wiring.
В Плату arduino входит микроконтроллер Atmel AVR и элементная обвязка программирования и взаимодействия со схемами. На плате имеется стабилизатор напряжения. Плата Serial Arduino представляет собой несложную инвертирующую схему для конвертирования сигналов с одного уровня на другой. Программы устанавливаются через USB. В некоторых моделях, например, Arduino Mini, необходима дополнительная плата для программирования.
Язык программирования Arduino используется стандартный Processing. Некоторые модели arduino позволяют управлять несколькими серверами одновременно. Программы обрабатывает процессор, а компилирует AVR.
Проблемы с контроллером могут возникать из-за провалов напряжения и чрезмерной нагрузке.
Крепеж двигателя
Моторама— механизм крепления двигателя. Применяется в установках двигателей. Моторама представляет собой взаимосвязанные стержни и элементы каркаса. Моторамы бывают плоскими, пространственными по элементам. Моторама одиночного двигателя 30 вольт или нескольких устройств. Силовая схема моторамы состоит из совокупности стержней. Моторама устанавливается в сочетании ферменных и каркасных элементов.
Бесколлекторный электродвигатель постоянного тока незаменимый агрегат, применяемый как в быту, так и в промышленности. Например, ЧПУ станок, медицинское оборудование, автомобильные механизмы.
БКЭПТ выделяются надежностью, высокоточным принципом работы, автоматическим интеллектуальным управлением и регулированием.
Источник
Как выбрать двигатель для квадрокоптера
Итак, теперь вы знаете основы работы и из чего он состоит, теперь узнаем, как выбрать мотор для дрона.
Размер двигателя
![]() Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Вот общие размеры двигателей для квадрокоптеров:
- 1806 – используются в минидронах, на них ставятся 3-х или 4-х дюймовые пропеллеры.
- 2204 – Одни из самых популярных двигателей в течение долгого времени. На них ставят 5-и дюймовые пропеллеры. 2204 начали терять популярность в 2015 году и сейчас почти не используются.
- 2205 – самые популярные моторы, на них можно ставить 5-и дюймовые трехлопастные пропеллеры.
- 2206 – набирающая популярность модель двигателей, имеет немного большие габариты за счет увеличения мощности на 15% в сравнении с 2205.
- 2207 / 2407 – Еще более мощные двигатели, гонка мощностей я бы сказал. По характеристикам, они могут выдавать тягу на 50% больше, чем 2205. Используются редко и еще не популярны.
RPM константа (kV)
Все моторые имеют рейтинг Kv. Этот рейтинг показывает то, насколько быстро будут крутиться ваши пропеллеры. Максимальное количество оборотов в минуту, которое сможет выдать ваш мотор, можно узнать, если умножить kV на напряжение аккумулятора. Так, если у вас двигатель 2300kV и батарея lipo 4s, то будет такая формула, так как у 4s lipo напряжение 14.8 вольт:
Но не стоит брать эту цифру как фактическое значение, которое будет развивать мотор, лучше использовать эту цифру как справочное число для ориентира — на что будет способен квадрокоптер на этих двигателях. Общая информация, какие пропеллеры нужно ставить на двигатели 2204 и 2205:
- 4-х дюймовые пропеллеры для двигателя 2600kV или с большим kV.
- 5-х дюймовые пропеллеры для двигателя 2300-2600kV моторы.
- 6-х дюймовые пропеллеры для двигателя 2300kV или с более меньшим kV.
Обратите внимание, что это не жесткие правила, а лишь рекомендации, но если вы будете придерживаться их, то ваш дрон будет летать с наилучшими характеристиками. Вес Единственное, что нужно помнить про вес, это то, что каждый сэкономленный грамм нужно умножать на 4 (или больше, смотря какой дрон будете собирать)
Тяжелые моторы обычно довольно мощные и компенсируют свой вес тягой
Вес Единственное, что нужно помнить про вес, это то, что каждый сэкономленный грамм нужно умножать на 4 (или больше, смотря какой дрон будете собирать). Тяжелые моторы обычно довольно мощные и компенсируют свой вес тягой.
Цена Цена одно из важных значений, чем выше цена, тем качественнее компоненты и сборка, а значит и результаты по скоростям и маневренности. В среднем цены от 600 до 2 000 рублей.
Вал Вал должен быть достаточно длинным, но не менее 13 мм в длину и 5мм в диаметре. 5мм это самый распростроненный диаметр у пропеллеров, в противном случае вам придется рассверливать или покупать новые проппы, так как они или не налезут или будут маленькие. А насчет длины — нужно не забывать, что пропеллеры закрепляются контргайками, а она должна полностью пройти вал по резьбе.
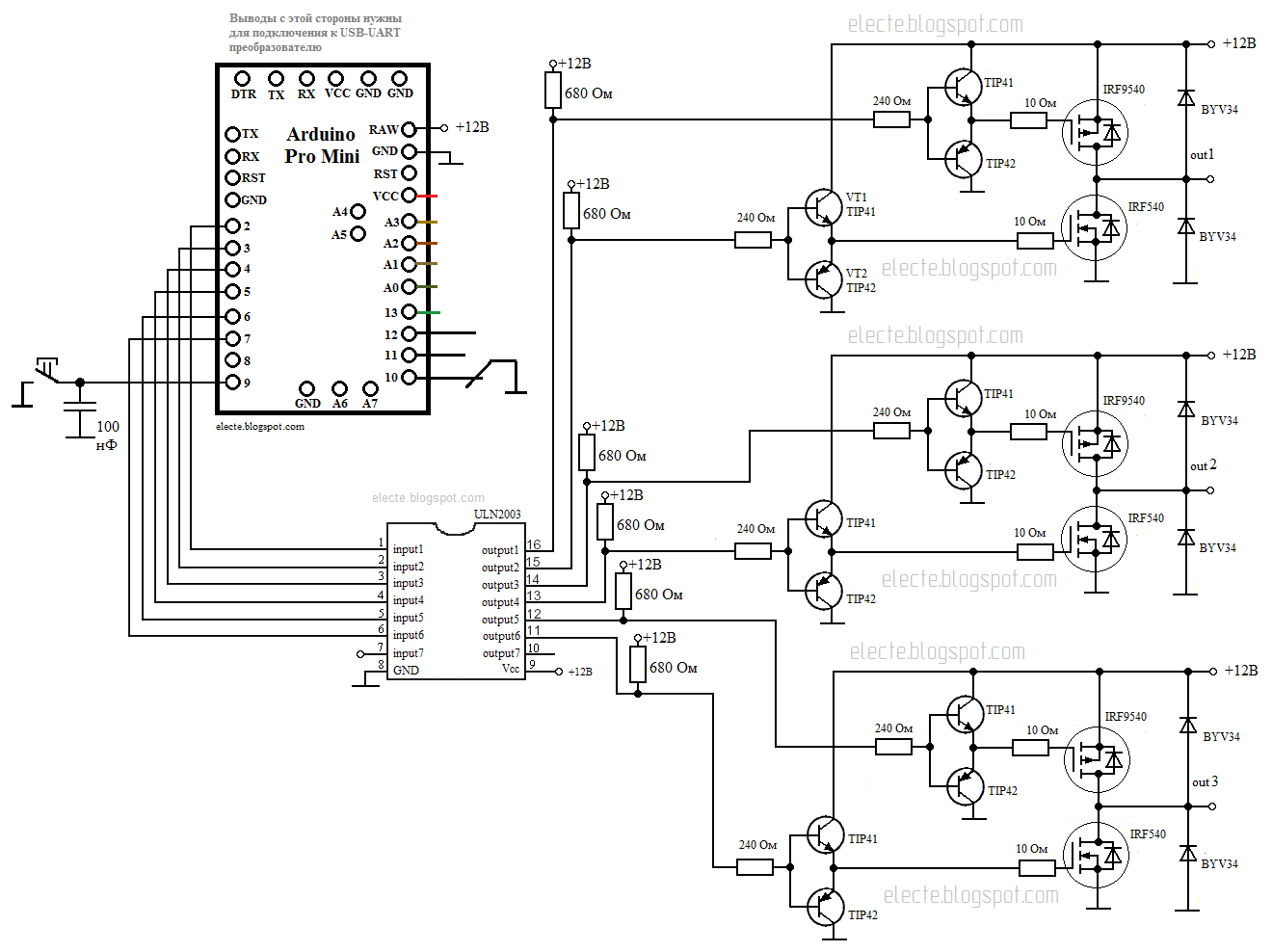
Кодирование Ардуино
Программа может быть такой, а можете разработать свою, например с плавным стопом-стартом.
const int phase1pin = 2;const int phase2pin = 3;const int phase3pin = 4;const int delayTime = 6000; // microsecs
void setup(){ Serial.begin(9600); pinMode(phase1pin, OUTPUT); pinMode(phase2pin, OUTPUT); pinMode(phase3pin, OUTPUT);}
void loop(){ switchStep(1); switchStep(2); switchStep(3);}
void switchStep(int stage){ switch(stage){ case 1: digitalWrite(phase1pin, HIGH); digitalWrite(phase2pin, LOW); digitalWrite(phase3pin, LOW); delayMicroseconds(delayTime); break; case 2: digitalWrite(phase1pin, LOW); digitalWrite(phase2pin, HIGH); digitalWrite(phase3pin, LOW); delayMicroseconds(delayTime); break; case 3: digitalWrite(phase1pin, LOW); digitalWrite(phase2pin, LOW); digitalWrite(phase3pin, HIGH); delayMicroseconds(delayTime); break; }}
Для данного двигателя от жесткого диска с 5400 об / мин использовалось напряжение 3,7 х 3 = 11,1 В. Минимальный период цикла = 1,3 мс, то есть он занимает около 1,3 х 2,25 х 2 = 5,85 мс для 1 об. Вы можете изменять значения в программе.

Форум
Свойства бесколлекторных приборов
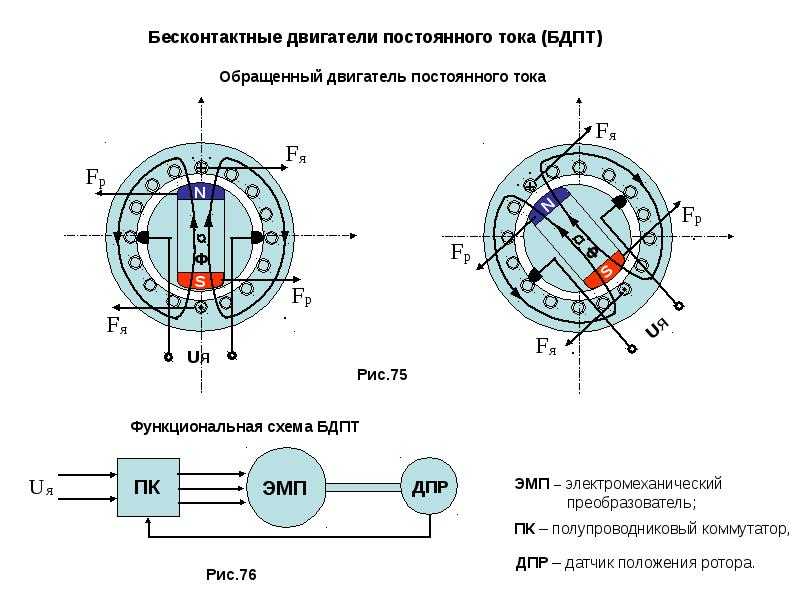
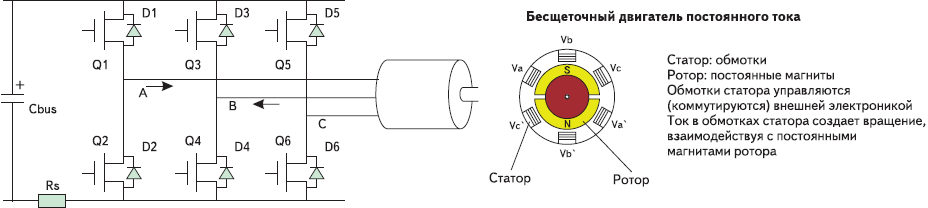
Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Конструкция может быть двух видов: с магнитами на подвижной части (якоре) или неподвижной (статоре). В устройствах автоматики для охлаждения используются приводы с конструкцией магнитов на якоре. Характерной их особенностью является быстрое достижение высоких оборотов.
В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
Сигнал на обмотки таких электромашин будет поступать от драйвера, задачей которого является управление вращающим моментом. Для того чтобы якорь повернулся на определённый угол, необходимо подать на нужные обмотки напряжение. Плавность вращения сохранить не удастся, но высокой скорости вращения добиться можно.
Разница между коллекторными и бесколлекторными двигателями состоит как в строении, так и в процессе работы. В контроллере коллекторные двигатели не нуждаются, а вот работа бесщеточного мотора без его участия недопустима. Достоинства бесщеточных двигателей:
- возможность работы в условиях с различными характеристиками окружающей среды;
- длительный срок использования;
- надёжность в работе.
Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Собрать вентильный или ДПТ своими руками — дело неблагодарное. Материалы, сложность работы и потраченное время будут стоить гораздо дороже, нежели потраченные средства на покупку двигателя заводского изготовления. Но надёжность и безопасность тоже будут в несколько раз выше.
Подбор этих электромашин необходимо проводить, опираясь на характеристики драйверов с каналами широтно-импульсной модуляции:
- предельное напряжение при длительном использовании;
- максимальная скорость вращения;
- допустимая сила тока;
- частота тока (обыкновенные устройства 7—8 кГц, более усовершенствованные модели — 16—32 кГц).
https://youtube.com/watch?v=3lrsTMphAJs
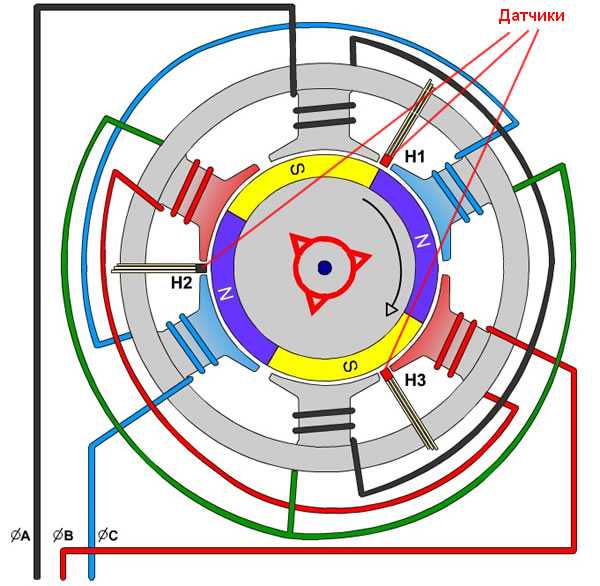
Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
По количеству фаз многие моторы являются трехфазными, и для управления ими необходим дополнительный узел в устройстве — выпрямитель постоянного тока в трехфазный импульсный. Управление трехфазным бесщеточным двигателем постоянного тока также вызывает некоторые сложности из-за параллельного контроля нескольких параметров. Поскольку электрические машины устройства обратимые, то бесколлекторный мотор можно подключить как генератор.
Подсоединение мотора
Так как наиболее распространены коллекторные двигатели, то рассмотрим подключение на них.
В таких устройствах есть следующие элементы:
- статор;
- ротор;
- тахометрический генератор;
- термопредохранитель (в некоторых моделях);
- заземление.
Нужно определить все контакты в колодке.
Элементы мотора
Прежде всего смотрим пару проводов от таходатчика — они, как правило красного цвета, и самые тонкие. Местоположение легко установить зрительно.
Таким же образом определяем ротор. От щёток двигателя идут провода непосредственно в колодку.
Если нет термодатчика, то оставшиеся два контакта — это статор. В стиральных машинах «БЕКО» (BEKO) заземление находится в колодке. В остальных оно располагается отдельно.
Общая схема подключения показана на рисунке ниже.
Схема подключения двигателя
Как видно, сначала нужно сделать перемычку между ротором и статором. Затем подать напряжение 220 вольт на оставшиеся два. Но если так сделать, а двигатель при этом не закреплён, то он просто «взлетит», т. к. сразу наберёт максимальные обороты. Дело в том, что в стиральной машине скорость регулируется с помощью тахометрического генератора.
Для включения асинхронного двигателя нужен пусковой конденсатор. Но для проверки, можно обойтись и без него. Для этого придерживаемся методике:
- с помощью тестера определяем пары обмоток;
- через ТЭН, последовательно подключаемся к каждой;
- пальцами, кратковременно закручиваем вал.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.

Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
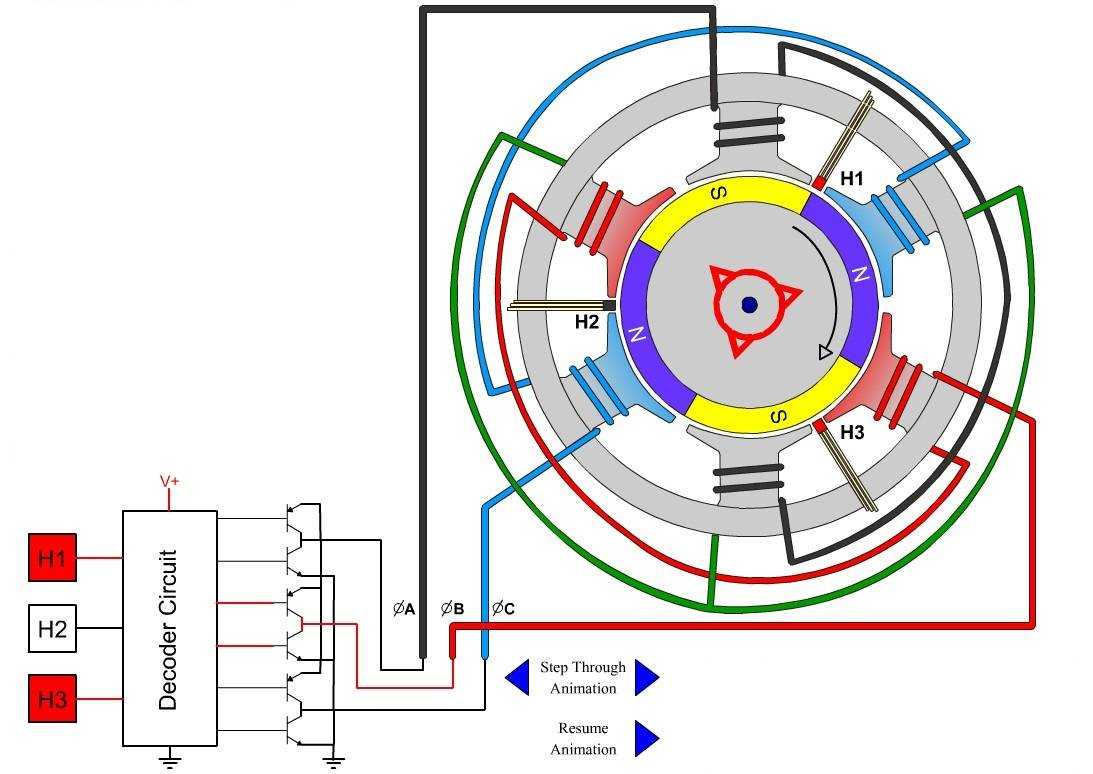
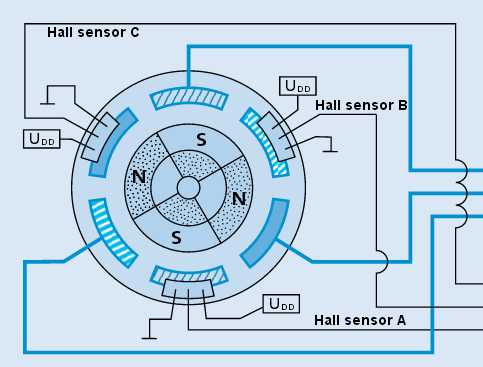
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
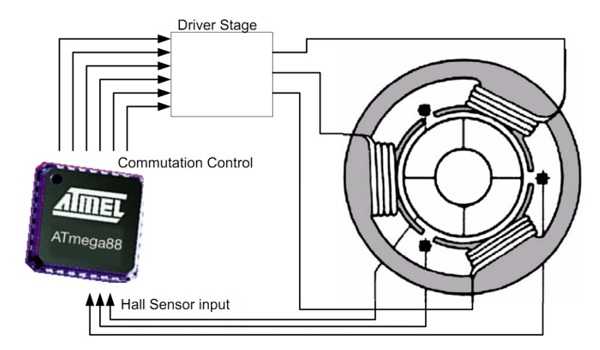
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
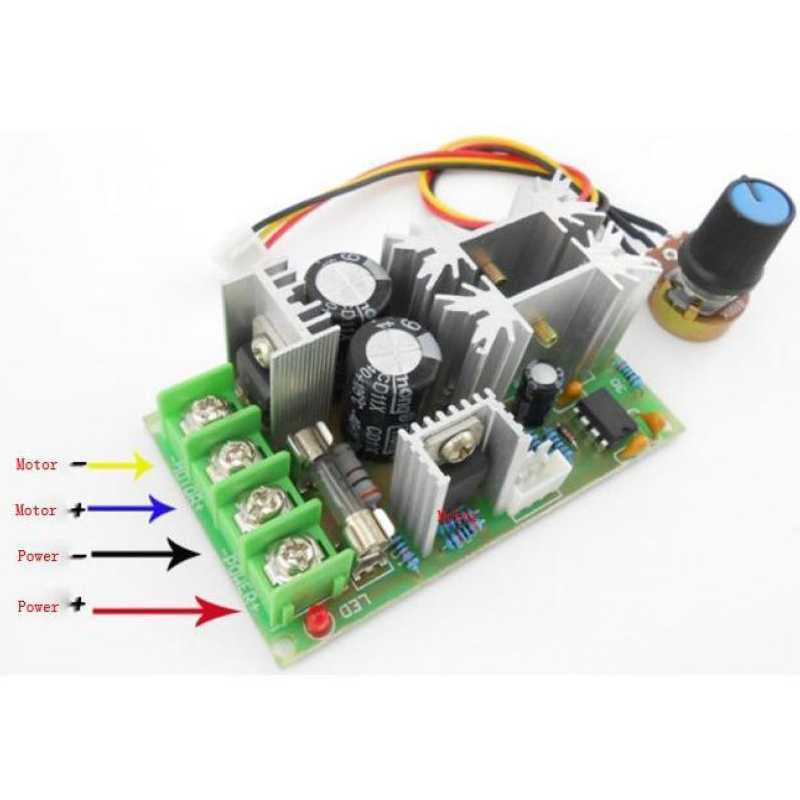
Контроллеры бесколлекторных моторов (ESC регуляторы)
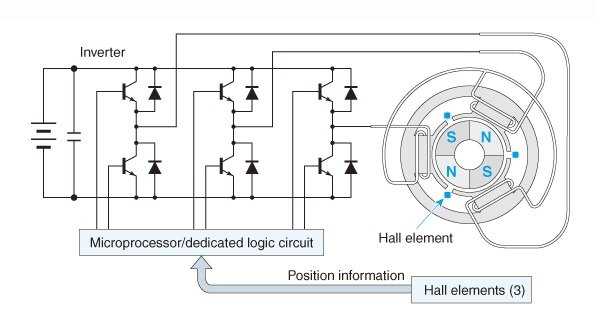
Для управления бесколлекторными моторами используют специальные контроллеры — ESC (Electric speed controller — электронный контроллер скорости) регуляторы (рис. 3).
Рис. 3. ESC регуляторы
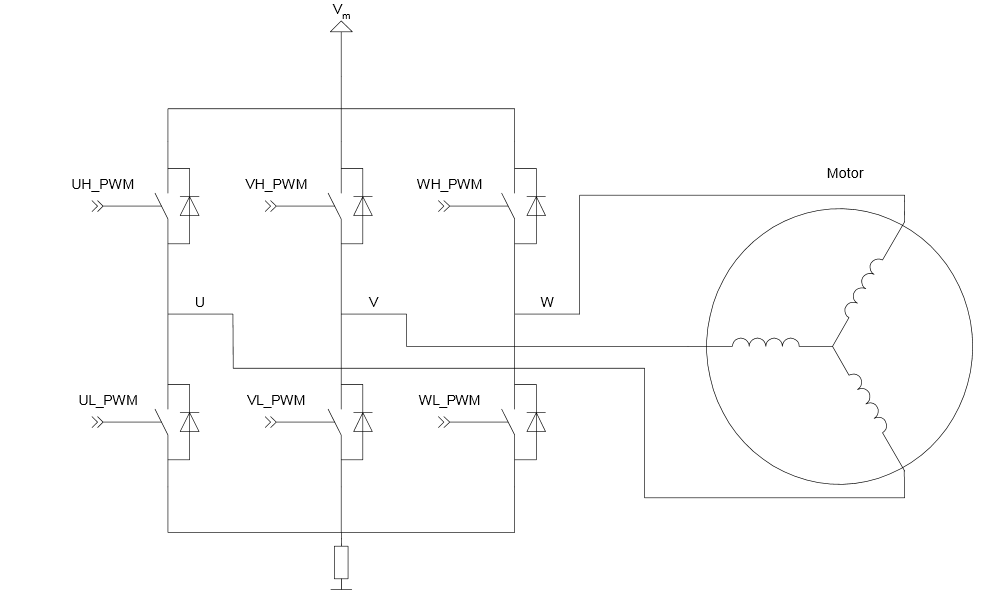
Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Для передачи энергии контроллер использует MOSFETы — силовые ключи, которые могут открываться и закрываться за долю секунды. Если мощности одного ключа недостаточно, используется несколько ключей, включенных параллельно. Попеременное включение/выключение фаз поддерживает вращение мотора. За переключением фаз следит микроконтроллер регулятора. Функциональная схема ESC регулятора показана на рис. 4
![]()
Рис. 4. Функциональная схема ESC регулятора