Изготовление токового прерывательного приспособления
Взяв пластинку небольших размеров, проводят её крепление на оси, для надёжности прижав конструкцию с помощью плоскогубцев. Далее проводят изготовление обмотки якоря электродвигателя своими руками. Для этого необходимо взять нелакированную медную проволоку.
![]()
Проводят подключение одного её конца к пластинке из металла, установив на её поверхности ось. Электроток будет проходить через всю конструкцию, состоящую из пластины, металлического прерывателя и оси. При контакте с прерывателем происходит замыкание и размыкание цепи, что даёт возможность подключения электромагнита и его последующего отключения.
![]()
Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой. Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Звони: +7-908-918-03-57
или пиши нам здесь…
https://youtube.com/watch?v=Po2miTqTr84
Войти Регистрация
В чате:
Виктор Потехин
Поступила просьба разместить технологию обработки торфа электрогидравлическим эффектом.
Мы ее выполнили!
2018-04-06 19:21:11
2018-04-06 19:21:52
Виктор Потехин
Поступил вопрос о лазерной очистке металла. Дан ответ. В частности, указана более дешевая и эффективная технология.
2018-04-11 23:18:19
2018-04-18 20:53:11
Виктор Потехин
Поступил вопрос по термостабилизаторам грунтов в условиях вечной мерзлоты. Дан ответ.
2018-04-29 09:51:54
Виктор Потехин
Поступил вопрос по стеклопластиковым емкостям. Дан ответ.
2018-05-04 06:47:56
Виктор Потехин
Поступил вопрос по гидропонным многоярусным установкам. Дан ответ. В частности указаны более прорывные технологии в сельском хозяйстве.
2018-05-16 20:22:35
Виктор Потехин
Поступил вопрос по выращиванию сапфиров касательно технологии и оборудования. Дан ответ.
2018-05-16 20:23:28
Виктор Потехин
Поступил вопрос касательно мотор-колеса Дуюнова и мотор-колеса Шкондина, что лучше. Дан ответ.
2018-05-16 20:30:50
Виктор Потехин
2018-05-17 10:35:28
Виктор Потехин
Поступил вопрос касательно санации трубопровода. Дан ответ. В частности указана более инновационная технология.
2018-05-17 18:10:26
Виктор Потехин
Поступил вопрос касательно сотрудничества, а именно: определения направлений развития предприятия и составления планов будущего развития. В настоящее время ведутся переговоры. Будет проанализирована исходная информация, совместно выберем инновационные направления и составим планы.
2018-05-18 10:34:05
Виктор Потехин
Поступил вопрос касательно электрохимических станков. Дан ответ.
2018-05-18 10:35:57
Виктор Потехин
Поступил вопрос относительно пиролизных установок для сжигания ТБО. Дан ответ. В частности, разъяснено, что существуют разные пиролизные установки: для сжигания 1-4 класса опасности и остальные. Соответственно разные технологии и цены.
2018-05-18 11:06:55
Виктор Потехин
К нам поступают много заявок на покупку различных товаров. Мы их не продаем и не производим. Но мы поддерживаем отношения с производителями и можем порекомендовать, посоветовать.
2018-05-18 11:08:11
Виктор Потехин
2018-05-18 17:44:35
Виктор Потехин
2018-05-23 07:24:36
бесколлекторный двигатель постоянного тока купить обороты своими рукамисхема работа устройство мощность подключение характеристики принцип работы драйвер контроллер регулятор расчет скорости оборотов бесколлекторного двигателя своими рукамисхема управление бесколлекторным двигателем постоянного токаподключаем мощный трехфазный ардуино коллекторный и бесколлекторный двигатель разница для радиоуправляемой модели с датчиками стиральной машиныавиамодельные бесколлекторные двигатели для моделей авиамоделей алиэкспрессквадрокоптер с бесколлекторными двигателями arduinoотличия бесколлекторных двигателейрегулятор перемотка ротор настройка регулятора бесколлекторного двигателя схемабесколлекторный асинхронный двигательуправление бесколлекторным двигателем arduinoмощный бесколлекторный электродвигатель постоянного тока купить трехфазныйколлекторный и бесколлекторный электродвигатель для авиамоделей своими рукамиустройство бесколлекторного электродвигателяуправление бесколлекторными электродвигателями
Количество просмотров с 26 марта 2018 г.: 49
comments powered by HyperCommentsИсточник публикации
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
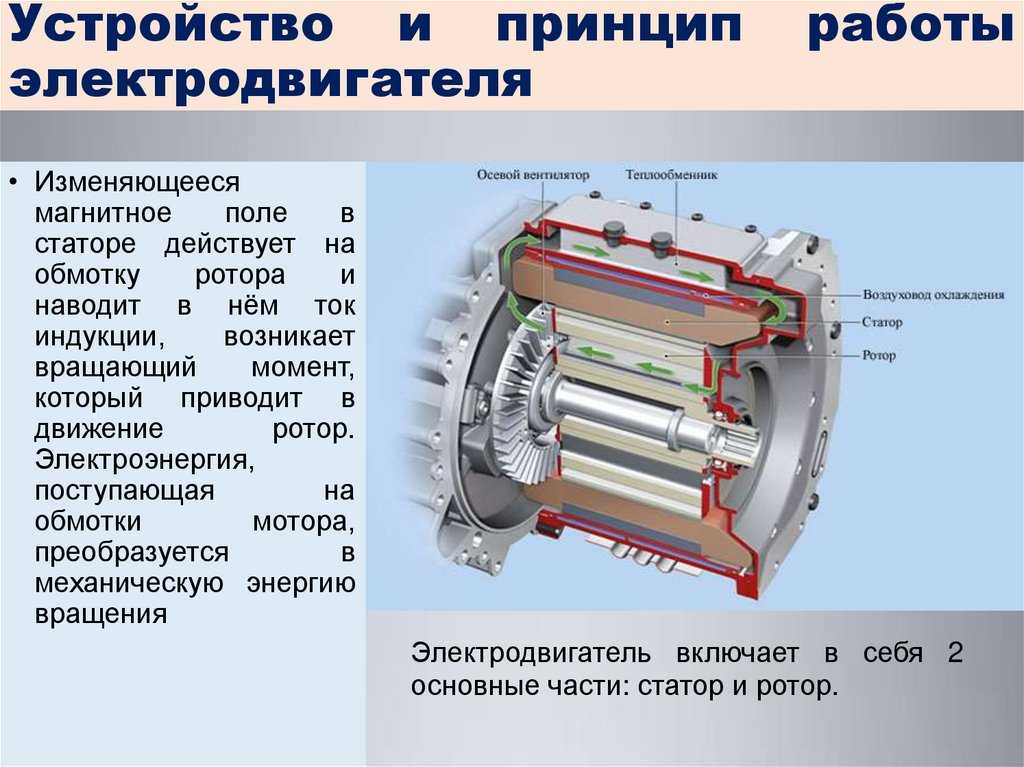
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.




![Как работает электродвигатель [для чайников]](https://yurymerkulov.ru/wp-content/uploads/4/2/b/42b3d2eb19b1d3e031881d79844d1b88.jpeg)


Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Фото регулятора оборотов своими руками
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
https://youtube.com/watch?v=zNGP002MSzk
https://youtube.com/watch?v=XXxPz3_f4hY
Также рекомендуем просмотреть:
- Замена масла в двигателе своими руками
- Ремонт двигателя своими руками
- Бампер своими руками
- Покраска авто своими руками
- Полировка автомобиля своими руками
- Полировка фар своими руками
- Замена порогов своими руками
- Регулировка карбюратора своими руками
- Как заменить свечи
- Багажник своими руками
- Замена лобового стекла своими руками
- Замена подшипников своими руками
- Химчистка салона своими руками
- Ремонт кузова своими руками
- Камера заднего вида своими руками
- Промывка форсунок своими руками
- Прицеп своими руками
- Замена сцепления своими руками
- Ремонт стартера своими руками
- Ремонт АКПП своими руками
- Регулировка фар своими руками
- Минитрактор своими руками
- Ремонт рулевой рейки своими руками
- Шумоизоляция автомобиля своими руками
- Тюнинг ваза своими руками
- Ремонт генератора своими руками
Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой
При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора
При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
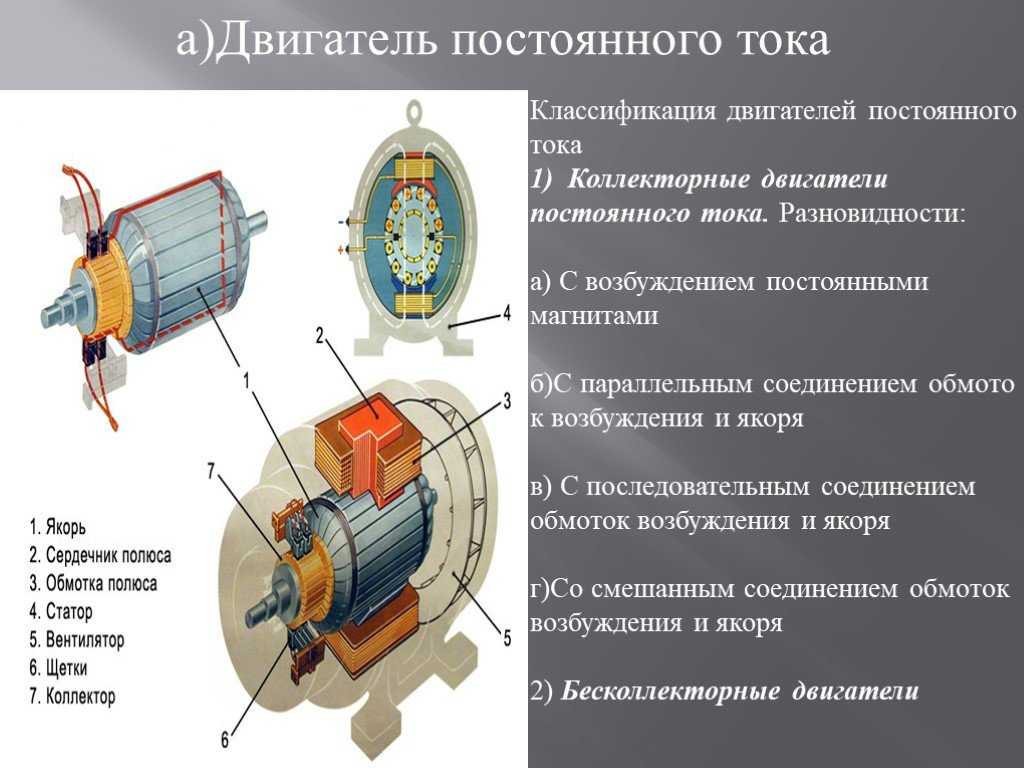
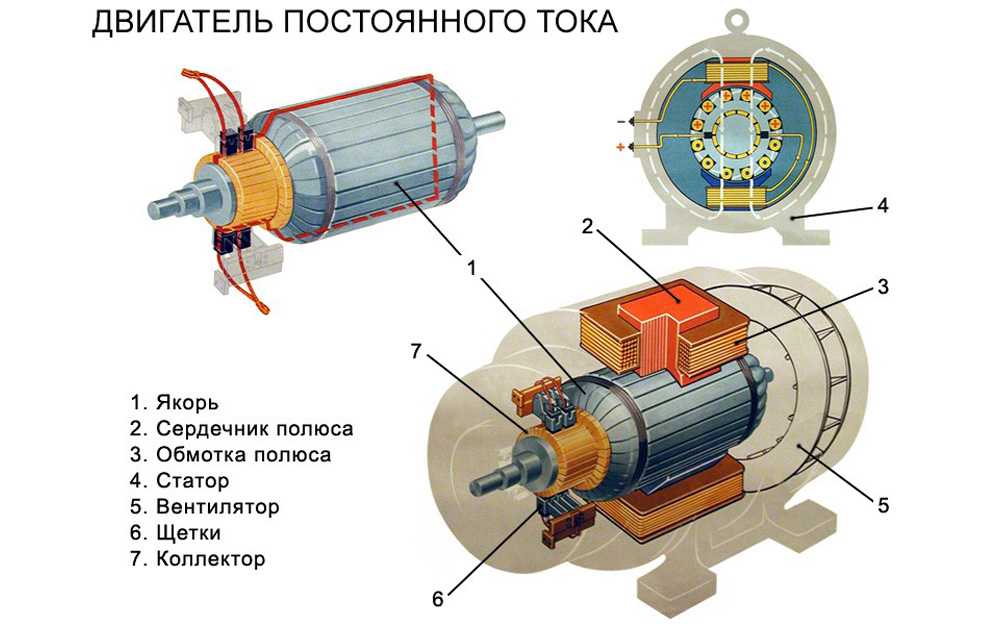
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
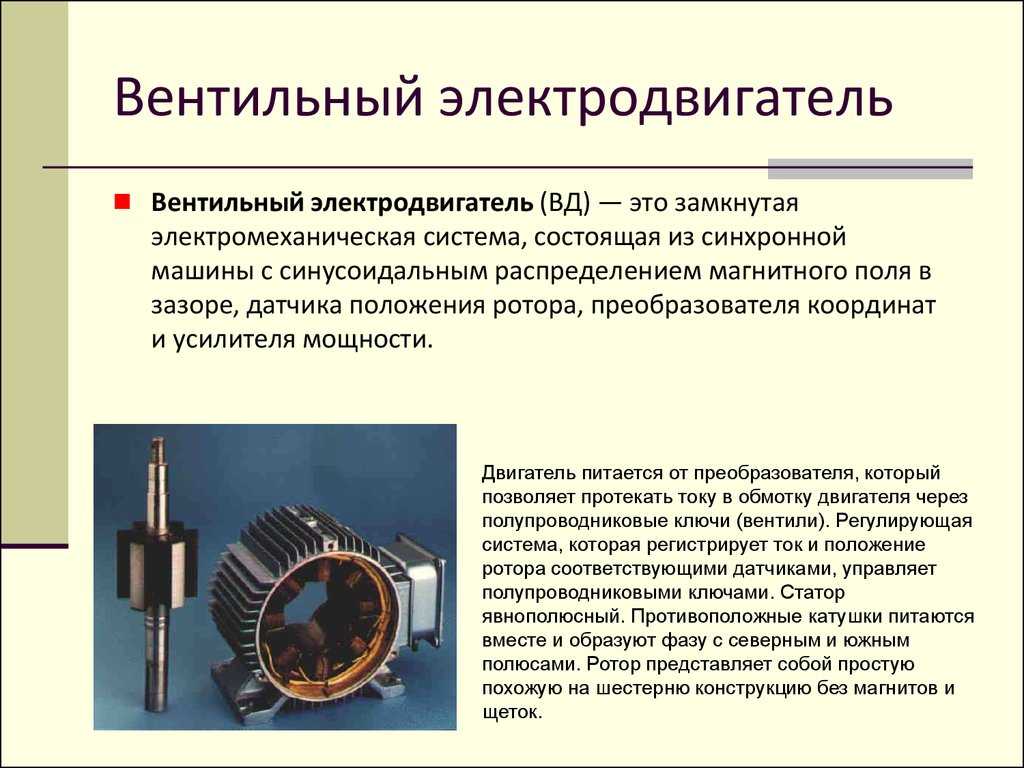
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.





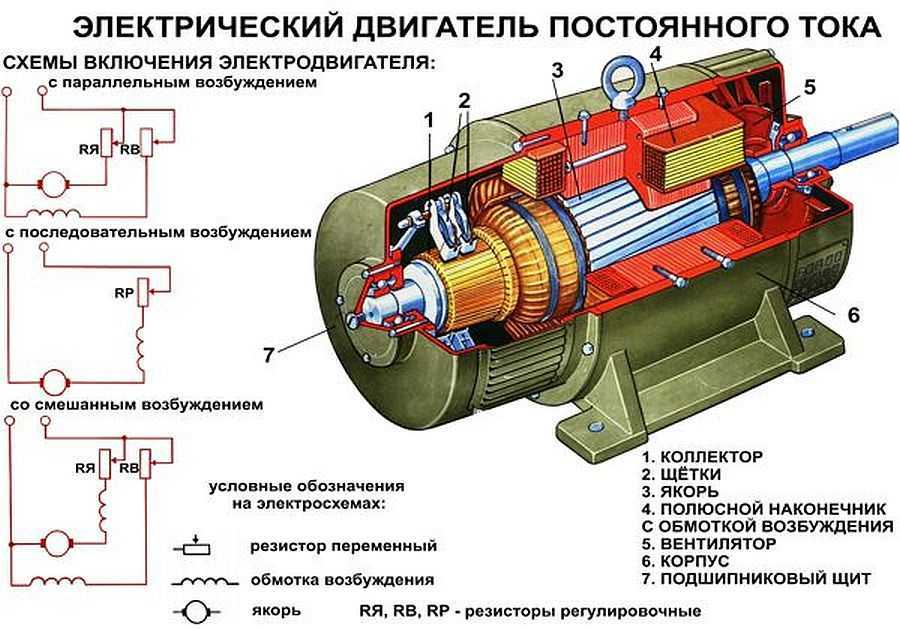
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
![]() Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Обмоточные данные электродвигателей
Это справочные данные, поэтому самый надежный способ получить такую информацию – обратиться к соответствующим источникам. Эти данные также могут приводиться в паспорте к изделию.
В сети можно встретить советы, в которых рекомендуют при перемотке вручную пересчитать витки и измерить диаметр провода. Это трата времени. Значительно проще и надежней по маркировке двигателя найти всю необходимую информацию, в которой будут указаны следующие параметры:
- номинальные рабочие характеристики (напряжение, мощность, потребляемый ток, число оборотов и т.д.);
- количество проводов для одного паза;
- Ø проволоки (как правило, в данном показателе изоляция не учитывается);
- информация о внешнем и внутреннем диаметре статора;
- количество пазов;
- с каким шагом выполняется обмотка;
- размеры ротора и т.д.
Ниже представлен фрагмент таблицы с намоточными данными для электромашин типа 5A.
![]()
Производители электродвигателей
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод «Электродвигатель» | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО «Электрические машины» | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СРД — синхронный реактивный двигатель
- СГД — синхронный гистерезисный двигатель
- УД — универсальный двигатель
- КДПТ — коллекторный двигатель постоянного тока
- КДПТ ОВ —
- КДПТ ПМ —
Производители электродвигателей ближнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Беларусь | Могилевский завод «Электродвигатель» | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод «Укрэлектромаш» | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
ГОСТ 16264.0-85 Электродвигатели малой мощности
А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011.
Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Отсутствие датчика
Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Бездатчиковые регуляторы хода изготавливаются легче, это объясняет их широкое распространение.
Контроллеры обладают следующими свойствами:
- значение максимального постоянного тока,
- значение максимального рабочего напряжения,
- число максимальных оборотов,
- сопротивление силовых ключей,
- импульсная частота.
При подключении контроллера важно делать провода, как можно короче. Из-за возникновения бросков тока на старте
Если провод длинный, то могут возникнуть погрешности определения положения ротора. Поэтому контроллеры продаются с проводом 12 — 16 см.
Контроллеры обладают множеством программных настроек:
- контроль выключения двигателя,
- плавное или жёсткое выключение,
- торможение и плавное выключение,
- опережение мощности и КПД,
- мягкий, жесткий, быстрый старт,
- ограничения тока,
- режим газа,
- смена направления.
![]()
Контроллер LB11880, изображенный на рисунке, содержит драйвер бесколлекторного двигателя мощной нагрузки, то есть можно запустить двигатель напрямую к микросхеме без дополнительных драйверов.
Запуск бесколлекторных моторов
![]()
Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера
Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
Дешёвые модели микроконтроллерных устройств имеют частоту генерируемых импульсов в интервале 7…8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя.
Для этого применяются датчики положения
Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее
Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.
![]()
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента
используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
![]()
Особенности управления трёхфазным бесколлекторным двигателем
с датчиком по положению на примере датчика Холла:
![]()
Система arduino
Часто для управления бесколлекторными двигателями используется аппаратная вычислительная платформа arduino. В основе находится плата и среда разработки на языке Wiring.
В Плату arduino входит микроконтроллер Atmel AVR и элементная обвязка программирования и взаимодействия со схемами. На плате имеется стабилизатор напряжения. Плата Serial Arduino представляет собой несложную инвертирующую схему для конвертирования сигналов с одного уровня на другой. Программы устанавливаются через USB. В некоторых моделях, например, Arduino Mini, необходима дополнительная плата для программирования.
Язык программирования Arduino используется стандартный Processing. Некоторые модели arduino позволяют управлять несколькими серверами одновременно. Программы обрабатывает процессор, а компилирует AVR.



Проблемы с контроллером могут возникать из-за провалов напряжения и чрезмерной нагрузке.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
![]()
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
![]()
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.
![]()
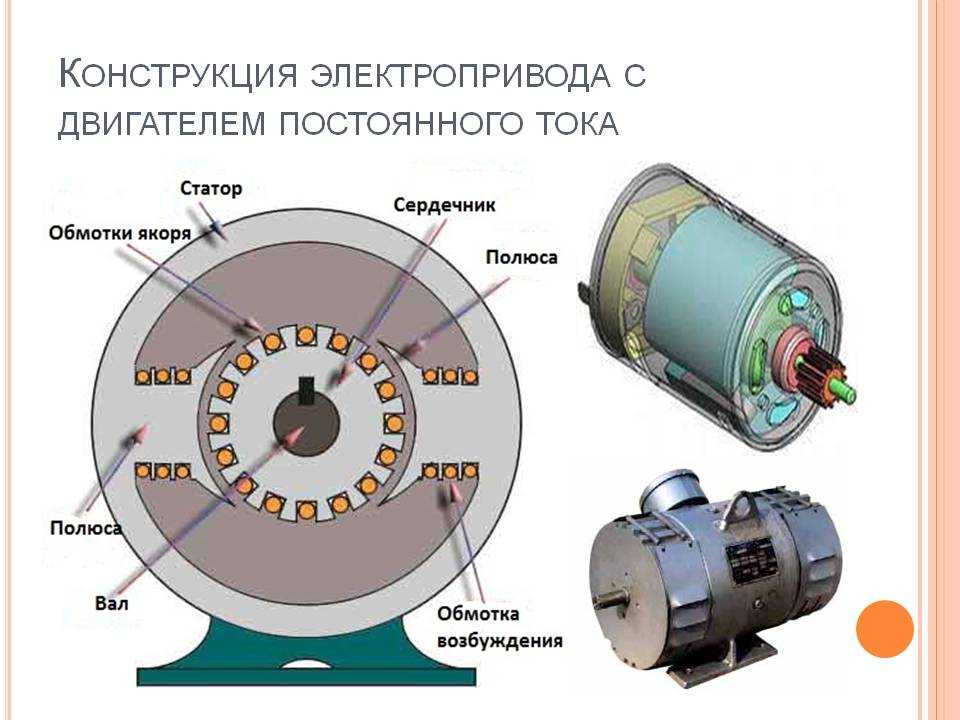
Устройство и принцип действия
Основными элементами БДПТ являются:
-
ротор
, на котором укреплены постоянные магниты; -
статор
, на котором установлены обмотки; -
электронный контроллер
.
По конструкции такой двигатель может быть двух типов:
с внутренним расположением ротора (inrunner)
![]()
с внешним расположением ротора (outrunner)
В первом случае ротор вращается внутри статора, а во втором – ротор крутится вокруг статора.
Двигатель типа inrunner
используется в том случае, когда необходимо получить большие обороты вращения. Этот двигатель имеет более простую стандартную конструкцию, которая позволяет использовать неподвижный статор для крепления двигателя.
Двигатель типа outrunner
подходит для получения большого момента при низких оборотах. В этом случае крепление двигателя производится с использованием неподвижной оси.
Двигатель типа inrunner
— большие обороты, низкий крутящий момент. Двигатель типа outrunner
— маленькие обороты, высокий крутящий момент.
Число полюсов в БДПТ может быть разным. По числу полюсов можно судить о некоторых характеристиках двигателя. Например, двигатель с ротором, имеющим 2 полюса, имеет большее число оборотов и малый момент. Двигатели с увеличенным количеством полюсов имеют больший момент, но меньшее число оборотов. Изменением числа полюсов ротора можно менять число оборотов двигателя. Таким образом, изменяя конструкцию двигателя, производитель может подобрать необходимые параметры двигателя по моменту и числу оборотов.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.











